
Радиоуправляемый самолет для полетов на 200 км
Обзор радиоуправляемого самолета My Twin Dream MTD FPV 1800mm Wingspan EPO RC Airplane Kit

My Twin Dream – это радиоуправляемая авиамодель рассчитанная на дальние FPV полеты.
Дальность полета ориентирована в 160 километров, а полетный вес может достигать 5 килограмм.
В конце статьи вы можете увидеть видео полета на дистанцию в 200 километров, там же приложена конфигурация электроники авиамодели и расчет энергопотребления для дальнего полета.
Авиамодель является дальнейшим развитием мультиплексовского TwinStar, имеет более емкий фюзеляж и удобный для установки FVP оборудования нос.
Видео обзор авиамодели и первый полет на ней.
“>
Многие считают, что радиоуправляемый самолет MyTwinDream – это один из лучших носителей для дальних FPV полетов.
Характеристики авиамодели My Twin Dream

- Размах крыла: 1800 мм
- Длина фюзеляжа: 1230 мм
- Общая высота: 350 мм
- Высота фюзеляжа: 160 мм
- Максимальная ширина фюзеляжа: 134 мм
- Вес пустого корпуса: 960 грамм
- Максимальная взлетная масса: 5 800 грамм
- Максимальное время полета: 210 мин
- Максимальная дальность: 160 км
- Максимальная скорость: 150 км
- Максимальная высота полета: 5000 метров
- Материал: EPO
Авиамодель выпускается с 2015 года и по ней можно найти много информации.
Оснащение для радиоуправляемого самолета My Twin Dream

Это базовая конфигурация для дальних, не не рекордных полетов.
Так как любые полеты дальше 500 метров от точки взлета возможны только через FPV оборудование, то давайте посмотрим, что нужно установить на радиоуправляемый самолет.
FPV оборудование для My Twin Dream

Начнем с главного – курсовая камера и видеопередатчик.
Курсовую камеру можно установить простую, без наворотов, хорошо для этих целей подходит Eachine 1000TVL CCD

Простая, в противоударном корпусе, весьма крепкая камера с возможностью вечерне-ночных полетов.
Можете выбрать и другую, смотрите статью 6 камер для FPV полетов.
Так же рекомендую посмотреть раздел дружественного сайта: Обзоры камер для FPV полетов. В этом разделе обзоры более 60 курсовых камер, есть что выбрать!
- Заказать Eachine 1000TVL можно тут.
Дальнобойный видеопередатчик для радиоуправляемого самолета

Видеопередатчик для дальних полетов лучше брать на 1.3 ГГц, при той же мощности сигнал на этой частоте позволяет получать видео на большем расстоянии.
- Заказать видеопередатчик и видеоприемник 1.3 ГГц 1500 мВт можно тут, 100 мВт – тут или 800 мВт – тут.
С направленной антенной на приемнике (вы же будете лететь в одну сторону, значит всенаправленный штырь на приенике не нужен) и видеопередатчиком на 400 мВт народ летает на 25-30 километров.
В болшинстве случаев, штатные антенны имеют хреновое качество, обычно на видеопередатчик ставят самодельную Vee антенну расчитанную под определенный канал, а на прием – направленную патч антенну (квадрат).

Однако, в большенстве случаев, у новичка в дальних полетах уже есть оборудование на 5.8 ГГц, так что будем рассматривать самое распространенное, кто решится на рекорды – тому эта часть статьи будет все равно малоинтересна, а кто хочет просто летать далеко, обычно желает иметь совместимость и с другими своими авиамоделями и квадрокоптерами.
Для дальних полетов используются видеопередатчики мощностью 1000-2500 мВт. На приемнике обязательна направленная антенна!
Внимание! При установке видеопередатчика разносите его и приемник RC сигнала максимально далеко друг от друга!!!
Рекомендуется использовние диверсити – выбирает лучший сигнал с 2-х приемников и показывает именно его.
В бюджетном подходе возможно использование видеошлемов.

VR D2 Pro и EV800D имеют встроенный диверсити, при этом EV800D может разделятся превращаясь в FPV монитор, но у VR D2 Pro лучше встроенная запись полетного видео.
Подробнее смотрите в статье Видеошлемы для FPV полетов. А так же в обзорах: Eachine VR D2 Pro и Eachine EV800D.
Камера для записи полетного видео на авиамодели дальнолете

На мой взгляд – наоболее оптимальная камера при полете на дальние дистанции, это RunCam 2!
Она имеет более аэродинамичный корпус чем обычные экшенкамеры, может питаться от бортового аккумулятора напрямую (5-17 Вольт), ее можно использовать и как курсовую (малая FPV задержка), подробнее смотрите в статье Обзор RunCam 2.
- Заказать экшенкамеру RunCam 2 можно тут.
Но, если хочется снять красивое видео без покачиваний от порывов ветра, то часто устанавливают трехосевой стабилизатор и GoPro или GitUp 2.

Такой девайс весьма сильно увеличит лобовое сопротивление и уменьшит автономность полета, но, что не сделаешь для красивых кадров! 🙂

Место расположения подвеса выбирается по своему вкусу, главное – соблюсти центровку авиамодели.
- Заказать недорогой подвес можно тут.
- Заказать экшенкамеру: GitUp 2 или GitUp 3 Duo.
Автопилот для радиоуправляемого самолета

Так как дальние полеты сопровождаются риском потери сигнала, то для минимизаии риска превращения радиоуправляемой авиамодели в свободноулетающую нужен автопилот!
Это не обязательное требование, многие летают и без него, но зато есть разница – вернется авиамодель самостоятельно в точку взлета или вам придется искать ее в 10-100 километрах от точки взлета. Первое требует вложения денег, второе – времени и имеет не нудевую вероятность потери всего оборудования установленного на самолете.
Обязательно поставьте GPS трекер!!!
Даже с автопилотом ваш дальнолетный самолет может не дотянуть до точки взлета (например – возвращаемся против сильного ветра, который поменял направление после вашего вылета). Искать легче, когда у вас есть GPS координаты посадки + записанное полетное видео (пишем на видеошлем).
Без треккера и без автопилота – не отлетайте дальше километра от точки взлета!
Видео поиска авиамодели с помощью GPS треккера
- Заказать GPS треккер можно тут или тут.
Лучше брать первый вариант – у него внешнее питание (12-100 Вольт) + встроенный аккумулятор. Прочная противоударная конструкция, даже при тотальном краше с пары километров высоты он сможет передать точку своего местонахождения.
Но, вернемся к поелтным контроллерам.
Оптимальным для новича считается автопилот FY-41AP Lite. Он хоть и старенький, но летает практически “из корбки без настроек”.
Поддерживает “автовозврат”, “воздушный забор”, “полет по точкам”. Об этом автопилоте достатточно большая дисскуссия на нашем авиамодельном форуме тут.
- Заказать автопилот FY-41AP Lite можно тут.
Пульт управления для самолета-дальнолета
На мой взгляд, Taranis – это оптимальная аппаратура радиоуправления для полетов. У нее очень большие возможности за счет использования LUA скриптов, стики на подшипниках, прецизионные резисторы дающие точный отклик без дребезга и многое другое.
По возможностям она превосходит дорогие (60-80 тр) пульты управления от брендовых фирм.
К тому же, FrSky Taranis штатно позволяет летать на 1.5-2 км против стандартных 850-900 метров у любой другой аппаратуры радиоуправления на частоте 2.4 ГГц.
- Заказать FrSky Taranis можно тут.
Если навороты вам не нужны и вы хотите использовать бюджетный пульт управления, то тогда ваш выбор FlySky!
Это самый бюджетный полноценный пульт управления!
- Заказать FlySky FS-i6 можно здесь.
В любом случае для дальних полетов вам придется модифицировать ваш пульт управления.

Самым простым вариантом является установка LRS модуля и приемника на частоте 433 мегагерца. Эта частота в России разрешена для бытовых целей. С помощью таких модулей и производятся полеты за 50 километров от точки взлета.
- Заказать LRS модуль с приемником можно тут.
Если у вас Таранис – то вы просто вставляете LRS передатчик в гнездо внешнего ВЧ модуля и все! Приемник подключается как обычно.
Можно пойти другим путем и поставить усилитель на 2.4 ГГц между вашим пультом управления и антенной. Кстати, вполне подходят активные усилители для WiFi, тк частота сигнала у WiFi и RC пульта одинаковая.
Тут доработки потребуют оба пульта, но она гораздо проще.
Так же необходимо заменить штатные антенны на имеющие большее усиление сигнала.
- Всенаправленные: 7 DBI, 14 DBI
- Направленная антенна: 25 DBI
Для сверхдальних полетов потребуется именно направленная антенна.
Так же стоит учитывать то, что радиоизлучение малополезно для организма, так что при использовании усилителя на 2.4 ГГц антенну лучше располагать на растоянии 1-2 метра от себя.
Ну вот, с базовой электроникой для самолета с дальним полетом разобрались, теперь можно поговорить и о самих полетах на этой авиамодели.
Полет на 200 километров на радиоуправляемом самолете My Twin Dream
Электроника установленная на авиамодели:
- Моторы: (2x) 470Kv MN3110-26 T-motors
- Аккумулятор: 31500mAh 6S LiIon (2654 грамм)
- Регуляторы: (2x) 40A YEP ESCs – set to AFW and have worked flawlessly for 62 flights so far.
- Пропеллеры: (2x) Aeronaut CAM Power Props 10×6 (AER7226/22)
- Пульт управления: Taranis x9D Plus
- Полетный контроллер: Eagletree Vector w/GPS V2
- Наземный модуль: Eagletree Eagleeyes Diversity and multi video splitter
- Бортовое питание: Castle Creations 10A BEC
Характеристики дальнего полета:
- Полетный вес: 4617 грамм
- Расстояние до разворота: 103.6 км
- Общая дистанция полета: 212.9 км
- Время полета: 3ч 54 мин 31 секунда
- Токопотребление за полет: 21849 мАч
- Расход мАч/км: 21849 мАч/212.9 км = 102.63 мАч/км
Как видите – полет за 100 километров от точки взлета и возврат на этой авиамодели вполне возможен!
Где купить авиамодель My Twin Dream
rc-aviation.ru
ЛМ-14 — самолет для FPV и видеосъемки
Мысль сфотографировать с высоты родное село своей мамы, где я в детстве проводил каждое лето, у меня появилась задолго до того, как я увлекся авиамоделизмом. Уж каких я только идей не генерировал: воздушные шары, змеи, катапульты (да-да, именно катапульты, которые запускали бы фотоаппарат со включенной видеозаписью, а потом спуск на парашюте) и даже такие экзотические мечты, как упросить кого-то из вертолетчиков покатать над селом, и взять в полет фотоаппарат. (Ну и где бы я их взял? А хотя — что взять с пацана — мечтать никто не запрещал ). В общем, потом как-то все забылось, да и с появлением детей, в село стал ездить намного реже . А вот тут на днях ездил туда, проведать, наконец, бабушку… и вспомнил о своем желании увидеть село с высоты. Читать далее →
Рубрика: Авиамодели, ЛМ-14 – самолет для FPV и видеосъемки |О моем самолете из потолочки для видеосъемки ЛМ-14 я уже кратко рассказывал. Однако, мой первый опыт конструирования самолета «с нуля» был неудачным (ну а что я хотел? Работа конструктора — она такая..). Хотя… зря я на себя наговариваю: мой самый первый построенный самолет из потолочки ЛМ-07 оказался живучим и неубиваемым Ладно, шучу я, хотя хвостовое оперение у ЛМ-07 с 2009 года живет . В общем, в модификации ЛМ-14м были исправлены две ошибки ЛМ-14: слишком маленькая жесткость крыла, и слишком маленькая хорда. Без новых ошибок все равно не обошлось, но в этот раз самолет весьма хорошо слушался ручек управления. Читать далее →
Рубрика: Авиамодели, ЛМ-14 – самолет для FPV и видеосъемки |Давно хотел себе такой самолет построить, чтобы в разобранном виде занимал минимум места. В идеале — габариты чемодана. Но вот только сейчас дошли руки сделать чертежи и построить. Мотор, регулятор, аккумулятор (с некоторой натяжкой) и прочая электроника использовалась та же самая, что и для первого самолета из потолочки ЛМ-17 и простого биплана ЛМ-2 (я же говорил, что будем строить еще один самолет . Эта заметка носит обзорный характер, а подробно о постройке еще напишу.
Читать далее →
Рубрика: Авиамодели, ЛМ-14 – самолет для FPV и видеосъемки, Своими руками |luckytech.ru
Самолёт, HD FPV, линк 600 км по 4G / Блог компании Virt2real / Хабр
В продолжение к вчерашнему топику про машинку.На машинке отлично покатались, но аппетит приходит во время езды — захотелось полетать. Само собой, над Питером, управляя из Москвы. Да простит меня Хабр, но самолёт — намного круче чем машинка, так что заслуживает отдельного топика.
У realizator как раз имеется самолёт Bixler, специально для экспериментов. Самолётик уже бывалый, успешно пережил немало морковок. Для тех кто не в теме — морковка это такая фигура высшего пилотажа, когда самолёт втыкается носом в землю.

Вот мы и подумали что ещё одна морковка погоды не сделает. Реализатор установил на Бикслер (который, кстати, имеет кличку «Кащей», ибо бессмертный) тот же самый комплект, который на машине стоял. Добавили один канал (для самолёта минимум три канала PWM требуется). Я у себя дома вместо курковой автомобильной аппы подключил самолётную аппаратуру управления (народную Турнигу — Turnigy 9x). Тот же самый сервер команд, та же рулилка виндовая — всё без изменений.
Реализатор поехал на полянку на окраине Питера, поездил рядышком — телеметрия с борта показала что сигнал Йоты намного слабее чем на Дворцовой площади был, но он есть и видео более-менее идёт.
Проверили элементы управления, полетели. Точнее, попробовали взлететь но немного нескоординировали действия, так что самолётик тут же свалился на землю. При этом надломился хвост. Но я рулём направления (который на хвосте) обычно не пользуюсь, да он у нас и не подключен даже, так что на это внимание обращать не стали.
Сделали ещё одну попытку и, ура, ура, получилось взлететь! Сделал один круг над полянкой, после чего я успешно приземлил самолёт. Надломленный хвост при этом совсем отвалился, но это не повреждение при посадке — он и был надломленный, так что можно не учитывать.
Во время полёта вообще не обращал внимания на кратковременные замирания видео — не до того было. А позже, когда уже пересматривал запись, увидел что реально были и дропы и замирания, но в воздухе оно не шибко критично при спокойном полёте и на более-менее большой высоте.
Кстати, я на этом самолёте ещё ни разу не летал, мой самолёт (как оказалось) не такой мощный и рулей похуже слушается. Так что, фактически, летел на новом для меня девайсе. Который, к тому же, был не оттриммирован, нейтраль осей не выставлена толком. Так что куча факторов сыграла про которые мы в кураже забыли абсолютно. Но всё равно — удалось полетать и приземлиться!
На самолёте нет никакой электроники кроме Виртурилки. Она всем рулит. Нет ни стабилизатора, ни автопилота. Зато теперь вполне можно рассматривать Виртурилку как кандидата на роль контролера автопилота, а то негоже таскать её на борту только как камеру.
После приземления попробовали ещё пару раз взлететь, но совсем без хвоста как-то не очень, либо у меня уже совсем руки трястись начали. 🙂 Короче, хвост совсем отломали. Но Кащей на то и бессмертный, Реализатор снова его починит и тогда продолжим.
Ну а вот видео с сегодняшним эпичным полётом. Видео длинное получилось, уж извиняйте, хотел всё впихнуть что отсняли.
Продолжение следует…
habr.com
Как строил самолёт-долголёт, для FPV полётов (по мотивам Skywalker V6) — Паркфлаер
Большую часть своего времени я тратил на строительство летающих крыльев для полёта по камере. Неожиданно для самого себя, захотелось построить самолёт классической схемы, с целью попробовать что то новое. Мало ли что-то упускаю, не разу не летав на классике. Всё же основной целью стояло большое полётное время, поскольку уже давно летаю исключительно по камере, ну и хотелось побольше времени проводить на поле, на свежем воздухе, в полном спокойствии под чирикание птиц и шуршание листвы деревьев.Не долго думая, еду по магазинам и затариваюсь всем необходимым: пеноплекс, жесть, бальза, карбоновые трубки, скотч, ну и остальное, что может пригодиться мне в процессе постройки.
Итак, теперь всё есть. Осталось определиться с габаритами и собственно внутренностями:
Размах крыла: 1500 мм;
Площадь крыла: 32 дм2;
Полётный вес 1400 гр.;
Мотор: 3007, kv1200, тяга 1350 грамм;
Винт: 10*5 APC;
Регулятор оборотов: 60A;
Аккумулятор: 3S 5200Mah, либо 2 шт. по 2200mah
Cервы: 2 шт. – Emax 08md, 2шт. – Emax 09md;
Автопилот: Cyclops shtorm;
Управление: LRS 433Mhz Rlink;
Видео: передатчик 1.2Ghz 800mw + самодельная антенна клевер под частоту 1280Ghz, на земле покупная патч антенна 12Dbi;
Курсовая и бортовая камеры: Gopro 4 silver.
Др. аксессуары: видео шлем
Определившись с размерами нашего нового носителя печатаю чертеж: 
Далее преступаю к резке крыльев, фюзеляжа, ну и так далее. Фюзеляж было решено делать одним большим болваном и сразу с хвостом, в который далее будет вклеиваться звено от удочки:


Собственно, как обычно, увлекшись, процессом постройки фотографировать забываешь, но получился коротенький совсем ролик по постройке.
Видео постройки:
Ещё фото:



В общем после всех недолгих относительно мучений получаем вот такой вот комплект, который придётся тащить на облёт: 

Сам облёт запечатлить мне не удалось, так как был один. Но в целом, всё прошло хорошо и в штатном режиме. Единственное пришлось помучиться с центровкой, так как долго не мог понять ровно ли летит самолёт на брошенных стиках или же нет.
Облетав и настроив самолёт, через несколько дней решаемся вылезти полетать уже на нормальные дистанции, да и в целом полюбоваться красотами с высоты. Получился вот такой вот ролик:
Во время полёта удалось удалиться на 3600 метров, общее полётное время на аккумуляторе 3S 5200Mah вышло 40 минут, при рабочих токах 3-10 Ампер. Что бы поддерживать горизонтальный полёт и скорость 30 км/ч мотору потребовалось всего 3 Ампера.

Результатом я остался очень доволен, так как на летающих крыльях удавалось максимум выжать 22 минуты, о 40 минутах я мог только мечтать.
Позже у меня было ещё несколько выездов в поле, но ролики было делать лень, так как за такое время полёта, камера снимала очень много материала, который я физически не успевал обработать.
Последний полёт на Скае, кончился для меня печально, так как пролетав по руслу реки, я увлёкся на столько, что забыл про дальность и не усмотрел за высотой. Получилось так, что на удалении 3.5 км, между мной и самолётом оказался завод с достаточно высокой трубой, в результате чего попали в затенение и произошла потеря сигнала на управлении, включился фэилсэйв, но автопилот включиться так и не успел, ввиду того, что в настройках у меня была выставлена задержка на включение 1 секунда, этого времени хватило что бы самолёт опустил морду и в пилился в землю (тут сам себе враг). Собственно вот видео моего уже последнего полёта:
Самолёт нашёл, электроника живая, что то потерялось (видео передатчик и мотор), но и урок тоже из этого извлекли. Сказать что расстроился тоже не могу, руки не опустились, жизнь продолжается.В заключении, самолёт понравился, цели по продолжительности полёта были мною достигнуты, эмоции от полётов только положительные. Из минусов, пожалуй могу отметить только не стабильность данной схемы (с виду летит как по рельсам, а по камере постоянно дерготня по крену).
На данный момент, занят очередным проектом по постройки летающего крыла с похожим полётным временем.
Всем ровных полётов и мягких посадок!
www.parkflyer.ru
FPV. От начинающего начинающим. Часть 1. Близко и низко. — Паркфлаер
Приветствую коллеги!FPV полетами я начал заниматься два сезона назад, этот сезон третий.
Решил на досуге написать серию статей, которая может помочь тем, кто только что пришел в это хобби. В статьях будет отражен мой теперешний авиапарк, от простого к сложному. Эта статья про мой первый пепелац, с которым я и начал покорять небо. Так он выглядел в молодости =)

SkyEasy Aerodrone
Почему именно он? Естественно первый самолет должен быть хорошо управляемым и стабильным в полете. При этом в силу определенных причин не хотелось брать большой самолет. Если быть до конца честным, первым как и у многих был FPV Raptor, и, как у многих, летал он мягко говоря сильно специфично… В силу недостатка опыта на тот момент, я не смог разобраться, что основная проблема Раптора – не правильный выкос двигателя. В итоге Раптор был отложен, а в последствии доведен до ума и продан, ну не лежала к нему душа как-то. А в качестве первого носителя был приобретен упомянутый выше Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1)
Товар http://www.parkflyer.ru/product/644013/ , для простоты самолет был прозван Изя.
Критерии, которым руководствовался при выборе:
– малый вес в штате, чтобы был запас для установки FPV аппаратуры;
– материал – EPO, чтобы легко и просто ремонтировался;
– умение лететь медленно, потому как пилот был чайник;
– хорошая самостабилизация;
– достаточный объем полезного простанства в фюзеляже;
– толкающая мотоустановка;
– размах крыльев 1м +-50мм, чтобы можно было носить не разбирая;
В итоге остался доволен им до невозможности.
Характеристики самолета:
– Размах крыльев 1050мм
– Длина 863мм
– Полетный вес с FPV оборудованием до 630гр. в зависимости от батареи.
– Мотор колокольчик 2730 2000KV
– Регулятор хода 18А TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей
Товар http://www.parkflyer.ru/product/4312/
(стоковый регулятор загнулся где-то на 20 полете из чего были сделаны соответствующие выводы)
– Пропеллер 7х4
– Полетное время около 15 минут
– Запас хода около 10км
– Крейсерская скорость около 40 км\ч.
Т.к. Изя официально не является платформой для FPV, то пришлось немного доработать конструкцию.
Так выглядел фюзеляж изнутри изначально:
Для размещения оборудования поверх всего этого были вклеены две пластиковых полки для оборудования и батарей, которые оклеил сверху липучкой:
От носа через фюзеляж и хвостовую балку до самого стабилизатора вклеил карбоновую рейку квадратного сечения 3мм (ее под полками не видно) для придания кострукции дополнительной жесткости.
Часть фонаря кабины была удалена и туда было вклеено крепление для камеры, а впоследствии для пан-тилта.
Так самолет выглядел когда впервые полетел в качестве FPV носителя, тогда еще без автопилота и пан-тилта для камеры:
Теперь перейдем к электронной начинке:
– Камера OSD Menu 650TVL HD SHARP CCD Starlight WDR Board Camera 2.8mm
– Видеопередатчик BEV 1.3G 400mW transmitter for FPV (до этого летал на передатчике 200mW, в этом сезоне решил немного проапгрейдиться)
– Low pass Filter LPF1200/LPF1400 (включается между видео передатчиком и антенной, глушит частоты больше 1,4ГГц, чтобы исключить негативное влияние на РУ 2,4ГГц)
– Антенна квадрифилярная 1.3ГГц круговой поляризации
– Микрофон Mini Microphone CCTV Security
– Автопилот Arkbird с OSD V3.1020
Товар http://www.parkflyer.ru/product/691352/
Arkbird
– FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
Товар http://www.parkflyer.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
– “Пищалка” для поисков модели в траве от Hobby King
Товар http://www.parkflyer.ru/product/102775/
для поиска
– TURNIGY 3A UBEC с помехоподавлением
Товар http://www.parkflyer.ru/product/4319/
TURNIGY 3A UBEC
– Видео батарея 11.1В 3S 360mAh
– Ходовая батарея 7.4В 2S 1000-1300mAh
Первое время летал без автопилота, пару раз чуть не погубил самолет из-за отказов видеотракта, но нервы все же дороже, потому обзавелся и ничуть не жалею. ArkBird прост в настройке, умеет управлять оборотами двигателя и вполне адекватен, есть правда один серьезный минус: при срабатывании Faile Safe (а именно это является для автопилота сигналом возвращать самолет домой) на земле или на минимальной высоте, при том, что самолет удален от базы больше чем на 30 метров, ArkBird пытается вести самолет домой, даже если тот, предположим, нештатно приземлился вдалеке от базы. Эту нехорошую его особенность разработчик исправлять почему-то не спешит. Набор фунций достаточно стандартен для подобных устройств: гиро-режим, режим полной стабилизации с поддержкой высоты и курса, режим полета по точкам, режим автоматического возврата на базу. Поучаствовать в обсуждении этого автопилота можно Автопилот Arkbird с OSD V3.1020
Товар http://www.parkflyer.ru/product/691352/
или здесь.
Что касается выбора камеры – это был компромисс между дорогим и всеми признанными Pixim SeaWolf 690TVL (которые кстати довольно тяжелые и громоздкие) и чем-то дешевым, но с мерзкой картинкой. Всем начинающим могу посоветовать не экономить 20 у.е. разницы и обязательно брать камеру с технологией WDR, что позволит летать при сложном освещении (например низкое солнце) и при этом видеть объекты на земле, а не черное пространство без ориентиров.
Микрофон – много копий поломано на форумах о необходимости иметь микрофон на борту, я стопроцентный сторонник его наличия, т.к. это идеальный источник информации о состоянии двигателя. При этом вес и энергопотребление минимальны, так что экономить на нем не стоит.
Для радиоуправления диапазон 2.4ГГц был выбран по нескольким причинам. Во-первых самолет изначально планировался под “близко и низко”, поэтому дальнобойная система ему не сильно нужна. Во-вторых, учитывая не большие размеры пепелаца, грамотно разместить на нем антенну на 433МГц будет проблематично ввиду ее не маленьких размеров. Что касается влияния видео передатчика 1.3ГГц на приемник РУ: при использовании LowPass фильтра никаких проблем выявлено не было.
На данный момент внутренности самолета выглядят так: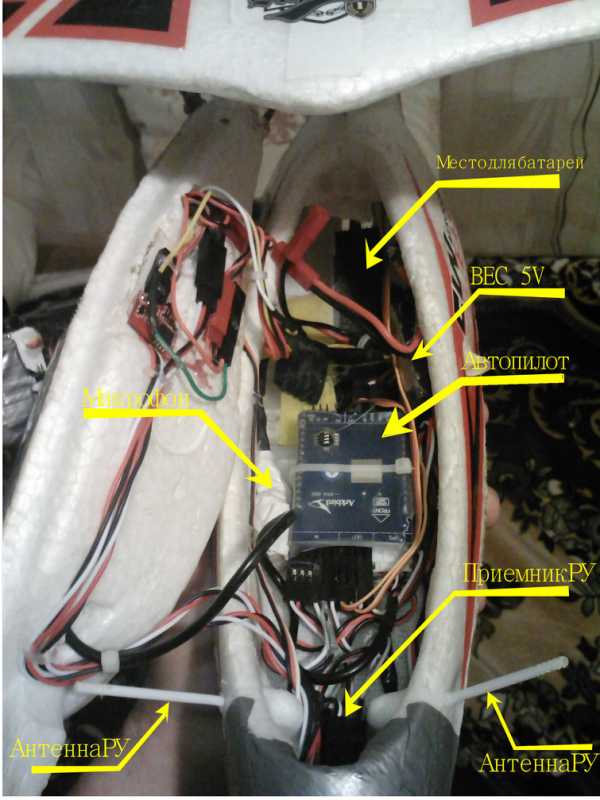
Достаточно удачно получилось сделать развесовку, батареи устанавливаются как раз в районе центра тяжести самолета, поэтому центровка не зависит от их веса. В основном сейчас летаю на 1300mAh 2S, но запас по грузоподъемности еще остался.
Наружность самолета выглядит так:
Как видите, пришлось пожертвовать фигуркой пилота, его место занял приемник GPS от автопилота ArkBird.
Радиоуправление на земле постоено на базе Turnigi 9X (слегка доработанной, Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+116
28 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
, для удобного управления пан-тилтом) с модулем FrSky DHT 8-ми канальный DIY передатчик с телеметрией
Товар http://www.parkflyer.ru/product/103811/
и ретранслятора, который описывал  Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
24 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
. Дальнобойность ретранслятора без бустрера – до 2,5км, вполне достаточно для “близко и низко”. Для полетов подальше можно использовать бустер, почитать на эту тему можно тут.
При компоновке придерживался приципа раздельного питания. Видеотракт питается от отдельной батареи Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po
Товар http://www.parkflyer.ru/product/7302/
, которой хватает на 50мин. работы (напомню, полетное время около 15 минут), вес ее при этом составляет всего 33гр. – т.е. совсем не значительный. В результате получаем страховку от потери видео сигнала, что вполне вероятно может случиться при просадке ходовой батареи, от которой питается двигатель. Да и ко всему прочему у данного пепелаца ходовая батарея 2S 7.4В, таким образом ее напряжения не достаточно для питания видеотракта, которому необходимо 12В, можно конечно использовать повышающий DC-DC конвертер, но надежность системы из-за этого только пострадает. Ну и кроме всего прочего: отдельное питание видео тракта – простейший и самый надежный способ избавиться от помех по питанию, генераторами которых являются регулятор хода и сервомашинки.
Также вместо встроенного в регулятор BEC использовал дискретный BEC на 3А (красный провод из трехпинового разъема от регулятора был извлечен и заизолирован), от которого запитал бортовое оборудование (сервы, приемник, автопилот), т.к. нередки случаи потери бортового питания вследствие проблем с регулятором скорости, вплоть до пробоя встроенного BEC, когда тот начинает гнать на борт полное напряжение батареи не стабилизируя его. Так же нередки случаи отключения встроенных BEC из-за перегрева. Учитывая все вышеперечисленное, дискретный BEC – хороший способ повысить надежность аппарата, даже если регулятор скорости погибнет, есть шанс спланировать, т.к. управление продолжит функционировать..
Схема питания электроники:
Наземную станцию описывать пока не буду – это тема для отдельной статьи.
В целом, самолет получился удачный. Для полетов близко и низко очень хороший вариант, но надо учитывать, что придется немного доработать.
Дополнение по просьбам читателей:
Летаю по телевизору 17″, очки пробовал – не понравилось, может потому, что HeadPlay не дают такого ощущения погружения, как те же FatShark, не знаю, их не пробовал, но было ощущение, что сидишь в темной комнате и смотришь на монитор, который от тебя на расстоянии метр. Задержки ощутимые тоже не улучшали впечатления. Опять же полет по телевизору позволяет быстро переключиться с полета от первого лица, на полет от третьего. Сажаю в основном от третьего лица, за исключением нештатных случаев, когда до базы еще далеко, но такое было всего пару раз, не дотягивал метров 50 всего-лишь, самолет цел, так что сажать от первого лица вполне реально. Есть товарищи, которые исключительно от первого лица предпочитают взлетать и садиться, но для этого хорошая полоса нужна, а у меня такой к сожалению в ближайшем доступе нет. Ну тут уж на вкус и цвет, кому-то полет в очках кажется лучше, кому-то по телевизору\монитору.
Что касается тех самых мелочей:
– при полете на значительные расстояния, для возможностей самолета, само собой лететь надо против ветра, чтобы по ветру домой возвращаться, но не забывать, что в зависимости от высоты полета направление ветра может меняться, поэтому постоянно контролировать это, то есть мониторить свою скорость по GPS, естественно надо знать крейсерскую скорость своего пепелаца и на ее основе прикидывать, что там с ветром происходит. Опять же настраивая автопилот учитывать скорость ветра и крейсерскую скорость пепелаца, чтобы при автоматическом пилотировании по ветру не довести самолет до сваливания – это касается автопилотов не имеющих датчика воздушной скорости, например тот самый ArkBird. Посему при ветре, скорость которого больше половины крейсерской скорости пепелаца стараюсь не летать вообще.
– при полетах на высоту не забывать соответствующим образом ориентировать антенны, как на земле, так и на аппарате. В основном это касается антенн РУ, которые в большинстве своем диполи. Вообще стоит поизучать диграммы направленности различных типов антенн, гуглится эта информация без проблем.
– для полетов в пределах 2км вполне достаточно будет той конфигурации, которую описал в этой статье. Более мощный передатчик на видео ставить наверное не стоит. Что касается управления, тот же FrSky, если управление реализовать через ретранслятор, вполне пробивает 2,5км. Вообще ретранслятор сделать очень рекомендую, дальнобойная антенна на пульте – извращение по-определению.
В этом году сезон FPV открывал тоже полетами на Изе. Уже практически традиция =) ну и навыки после зимы на нем восстанавливать – самое то.
Вот небольшая нарезка видео с курсовой камеры, с открытия сезона в этом году (YouTube видео подпортил солидно, в оригинале разрешение 720х576, зачем оно его в 360р ужало – загадка):
Прошлогодняя запись на HD камеру с борта:
Свежее видео, полет на 4км удаления. Автопилот заменен на EagleTree OSD Pro, гадость та еще, но Арк понадобился для новых проектов.
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
З.Ы. Если у кого-то возникли вопросы по существу – задавайте, не стесняйтесь, всем постараюсь ответить.
==================================================================
Мои предыдущие статьи:Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
24 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
Увеличиваем максимальный угол отклонения стандартной сервомашинки.+60
17 ноября 2013 года в 16:56 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2958/
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+116
28 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
Про выкладывание видео YouTube в ленту и т.п.+39
18 апреля 2014 года в 22:50 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/7755/
www.parkflyer.ru
ЛМ-15 — самолет для FPV и видеосъемки
Что-то грустно как-то. Вот даже записки свои не обновляю так часто, как того когда-то хотелось. И ведь — писать вроде как бы даже есть про что, но… то ли лень, то ли жара (была), то ли просто нет настроения.
В общем, обещанный ЛМ-15 уже собран, испытан, и даже несколько раз приложен об земную твердь (неудачные полеты при испытаниях автопилота).
ЛМ-15 — Простой самолет для FPV и видеосъемки
Во время сборки этого самолета не было сделано ни единой фотографии. Ну… как-то так получилось. Но ничего — я еще один ЛМ-15 буду строить под пристальным прицелом фотоаппарата и видеокамеры — как и обещал. А сейчас — просто кратко опишу те полеты, которые я на ЛМ-15 отлетал (хотя вряд ли это будет интересно кому-то, кроме меня самого ). Ну и про сам самолет кратко расскажу.
Итак, после списания ЛМ-14м (об этом еще напишу, почему и как) от него остался стабилизатор и… чехол. А так как ЛМ-15 планировался по длине больше чем ЛМ-14м (чтобы отдалить стабилизатор от крыла), то фюзеляж был запланирован складываемый.
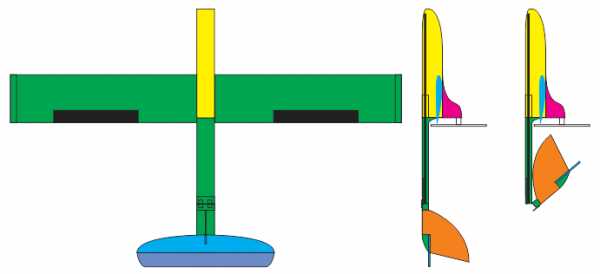 К силовой конструкции крыла подошел весьма радикально: продольный фанерный лонжерон вдоль консоли + маленький кусок карбоновой трубы, пропущенный через обе консоли и фюзеляж. Это обеспечило очень хорошую жесткость. Веса, конечно, добавилось… но наверное, это того стоило.
К силовой конструкции крыла подошел весьма радикально: продольный фанерный лонжерон вдоль консоли + маленький кусок карбоновой трубы, пропущенный через обе консоли и фюзеляж. Это обеспечило очень хорошую жесткость. Веса, конечно, добавилось… но наверное, это того стоило.
К жесткости фюзеляжа тоже подошел радикально — две карбоновые полоски вдоль основной части.
Профиль крыла в отличии от ЛМ-14м был выбран ClarkY 12%. Это позволило изменить технологию постройки и в результате получить намного более точную форму передней кромки. Кроме того, сделал, наконец, законцовки на консолях. Сборка занимает немного больше времени, нежели в ЛМ-14м… но ведь и ЛМ-15 побольше размерами
Сборка занимает немного больше времени, нежели в ЛМ-14м… но ведь и ЛМ-15 побольше размерами
Испытания простого FPV самолета ЛМ-15
Все же с центровкой у изначальной версии ЛМ-15 было все грустно. Система фиксации хвостового оперения (да и сервомашинка на стабилизаторе) сделали свое черное дело — центровка была ощутимо задней. Даже увеличенная длина носовой части не помогла — веса аккумулятора 2200мАч просто не хватало. В принципе по расчетах выходило, что если нагрузить на самолет всю необходимую FPV аппаратуру на самом носу — центровка почти станет нормальной. Но… не хотелось этого делать в первом полете. В общем, в первом полете ЛМ-15 летал с двумя аккумуляторами (один для веса).
Кроме-того, я забыл, что для толкающей схемы центровку можно делать более задней, чем для тянущей. Так-что, ничего удивительного, что в первом полете ручка управления была до упора «на себя» постоянно. Центровка — 18% САХ.
Строго говоря, это не есть первый запуск Первый — вот ссылка : от броска аккумуляторы сорвало с места и унесло куда-то в недра фюзеляжа. Центровка стала ОЧЕНЬ задней… и, в общем еле приземлил безаварийно. После этого примотал аккумуляторы скотчем… несерьезно, но мне нужно было определить правильную центровку.
Следующий полет с центровкой 25% был уже получше. Во всяком случае — ручку не нужно было постоянно держать «на себя». Но с нештатным грузом (лишний аккумулятор) на носу нужно было что-то делать. Вряд ли я смог бы поставить всю свою FPV аппаратуру с автопилотом на самый нос.
Дома вырезал крепление крыла из фюзеляжа, и передвинул его на 2см дальше от носа. Такой вот способ подправить центровку. Этого оказалось вполне достаточно, чтобы ЛМ-15 с одним аккумулятором на борту и камерой на носу имел правильную центровку. Вес уменьшился с 1050г до 840г. Сразу же пошел на испытания
В этом полете ЛМ-15 вел себя безупречно. Ура! Он даже красиво планировал, не пытаясь свалится, как его собрат ЛМ-14м. Т.е. как самолет для видеосъемки — ЛМ-15 уже был полностью готов. Вот только, хотелось бы опробовать его с FPV… а это значит, что летать он будет все же не так хорошо, как в этом полете. Об попытках FPV полетов на ЛМ-15 в другой раз, а пока вот ссылки на бортовые видео: первая, вторая. С весом 840г — хотелось побольше полетать
luckytech.ru
Простая модель для FPV за вечер (фотоинструкция)
Всем привет.
Хотела бы внести и свою лепту в авиамоделирование, так сказать, от женской и прекрасной половины человечества.
Хочу вам продемонстрировать одну интересную и простую в сборке модель самолета для FPV полетов. Ее я нашла на одном англоязычном сайте и хотела бы поделиться с вами. Собиралась эта модель один вечер, и одну ночь сохла. Также хотела бы предоставить обзор постройки данной модели.
Вот, кстати, я с ней в день полетушек)))

По заявлениям автора (MikeyRC), данная модель может таскать до 400грам дополнительного веса. Так как я снимать видео расчитывала только на карманную камеру Турниги, то сильно усиливать не стала. К ее преимуществом можно отнести небольшой размер: метр в ширину и немного больше в длину. Про самолет рассказала, себя показала, теперь можно и про сборку рассказать.
Сборка FPV-самолета
Для постройки этого самолета я купила упаковку красивой розовой потолочной плитки (От нее осталось два листочка)

Жалко, что на фотке не видно рисунок на плитке.
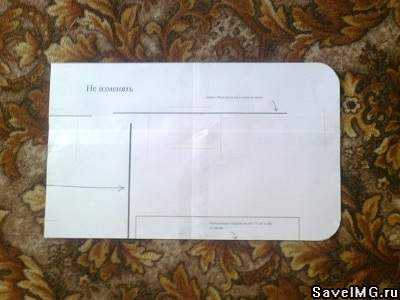
Для начала нужно скачать чертежи модели вот отсюда и их распечатать.
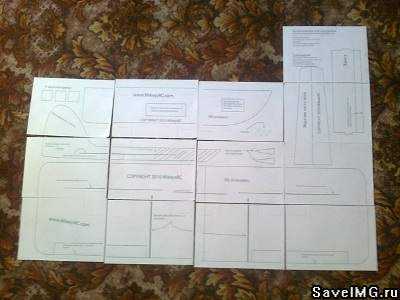
Будьте внимательны с масштабом. Для этого на первой странице есть шкала масштаба. Сперва распечатываете первую страницу, измеряете длину этой линии, если размер совпадает, то печатаете остальные листы. Склеиваете все листы скотчем, а потом вырезаете ножничками. Для составления листов там есть красные полоски.
Вырезать детали я начала с крыла. Так как я делаю самолет из потолочки, а не из депрона, как рекомендует автор, то пришлось ее склеивать в два слоя.
Сперва я вырезала половинку крыла.
Длина оказалась немного больше, чем потолочка. Пришлось крыло немного подрезать –примерно на 2 см, но меня это сильно не расстроило. Таких крыльев нам нужно 4 штуки.

Для жесткости автор рекомендует вклеить углепластиковую трубку. Так как у меня ее не было, пришлось вклеивать сосновую рейку. Также склеиваем заготовки между собой попарно.

Следующей деталью стал нос самолета. На одну плитку он не убрался, пришлось делить на 2 части. Таких деталек надо 2 штуки. Стык сделала впереди, потому что перед все равно будет усиляться для смягчения возможного удара (тьфу три раза).

Для дополнительной жесткости заклеила разрез полоской скотча.

Эту деталь откладываем к крыльям и идем дальше.
Название следующей детали я не знаю. Назову его полухвостие)))
Так вот, надо две таких детальки. Каждая деталь в два слоя. То есть всего четыре штучки. При большом желании две заготовки убираются на одну плитку.

Для жесткости, как и в крыло, вклеиваем рейку. Как, кстати, я вклеиваю. Да просто: прорезаю заготовку насквозь и туда вклеиваю рейку ))) Сверху заклеиваю скотчем) Никаких заморочек)

Далее следует перекладина хвоста и верхняя часть носа. Они вырезаются, вклеиваются в два слоя и отправляются к остальным.

На этом этап вырезания деталей закончен. Теперь надо склеить их между собой. Ниже общее фото все деталек.

Плавно переходим к сборке. начнем со сборки крыла. Для большей устойчивости модели автор рекомендуетсделать небольшое V крыла. Для начала половинки склеиваем скотчем, складываем пополам и края промазываем клеем. Я, кстати, пользуюсь Титаном. После того, как клей высохнет, крыло будет выглядеть примерно как на следующем фото.

Чтобы крыло не разлетелось обратно на две половинки, внизу приклеила кусочек потолочной плитки. Наверно можно еще и линейку приклеить… Чтоб уж держалось, так держалось)))
Далее займемся изготовлением площадки для моторчика. На чертеже есть выкройки (3 квадрата). Их вырезаем и склеиваем вместе. К ним приклеиваем кусок фанеры от фруктового ящика для крепления мотора. Затем мотор прикручиваем винтами, которые предназначались для крепления серв. Какая разница, что ими крикручивать, главное чтоб держали))) Наш “бутерброд” надо повесить на торец заготовки фюзеляжа. Для того, чтоб моторчик лучше держался, приклеим треугольники из пеноплекса.

Также на фюзеляже вырезаем “полочку” под батарейку, которая показана на чертежах.вырезанную часть будет служить самой полочкой. Только ее также нужно снизу “подпереть” треугольниками пеноплекса.
Ах да, не забываем про горизонтальную часть фюзеляжа – полочку, на которой крепится камера. Ее также приклеиваем с треугольничками.
Итак, с “полочками” закончили, теперь переходим ниже….к хвосту)))
В «полухвостиях» делаем прорези, и вклеиваем туда нашу перекладину. Про то, как делать рулежки, я писать не буду. Про это есть прекрасные статьи Константина, за что ему большое спасибо. И тем более, Вы все тут умные мальчики)))

Возвращаемся к сборке. Приклеиваем наш хвост к крылу. Следим за тем, чтобы небыло перекосов и всякой такой дребедени. В качестве помогайки пользуемся выкройкой крыла – там места вклеивания обозначены. Для того, чтобы хвост лучше прилегал к крылу, места прилегания нужно подрезать ножичком или шкурочкой под небольшим углом.Также к крылу приклеиваем фюзеляж. У самолетки появляется фигура))) После того, как я увидела все это в сборе, сразу придумала этой модельке название – “Бабочка”)))

Чтобы крылышки у нашей Бабочки не сложились, автор рекомендует сделать подпорки из углепластиковых трубок.
Так как его у меня их нет, а сделать хотелось, то я вклеила сосновые рейки. Заодно примерила пропеллер.

После этого останется сделать на крыле рулежки, посадить их на петли и протянуть тяги. Также приклеить сервочки и всю электронику. Вот как это сделала Я)))

Ну вот наша Бабочка и готова))) Полностью ее со своей создательницей вы видели на первом фото этой статьи))
А теперь воспользуюсь случаем))) Хочу сказать спасибо своему папочке, который меня поддерживает и помогает осваивать это увлекательное занятие – моделизм. Константину за такой конкурс, где любой желающий может показать себя. А также всем-всем, кто прочтет мою статейку до этих строк)))
Елена (Lisa) 2011
rc-aviation.ru
