
Полетный контроллер, для чего он нужен – Сайт о квадрокоптерах и FPV
 Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетные контроллеры делятся на 3 группы:
- Гоночные полетные контроллеры
- Контроллеры для съемки видео и фото с дрона
- Контроллеры для автономных полетов
Каждый контроллер имеет свое программное обеспечение, которое управляет всем оборудованием. Самые популярные контроллеры можно прошивать и гибко настраивать с помощью специальных программ, таких как CleanFlight, Betaflight и Raceflight.
Содержание
- Какие бывают полетные контроллеры?
1.1 Гоночные полетные контроллеры
1.2 Контроллеры для съемки видео и фото с дрона
1.3 Контроллеры для автономных полетов - Прошивка полетного контроллера, их виды
- Процессор полетного контроллера
- Гироскоп и акселерометр полетного контроллера
4.1 Выбор гироскопа: частота опроса и шумы
4.2 i2c и SPI - Порт UART в полетном контроллере
5.1 Сколько бывает портов UART на полетном контроллере?
5.2 Инвентированный сигнал и UART - Размеры платы полетного контроллера
- Какие есть дополнительные функции в полетном контроллере?
- Заключение
8.1 Рекомендованный список новых полетных контроллеров, соответствующих современным требованиям
Какие бывают полетные контроллеры?
Ниже рассмотрим вопрос — какие бывают полетные контроллеры, а точнее, для каких целей.
Гоночные полетные контроллеры
profpv.ru
Топ 5 лучших полетных контроллеров
Здесь будут перечислены несколько лучших полетных контроллеров (ПК) для гоночных мини коптеров с прошивками Betaflight, KISS и Raceflight, выбор сделан исходя из их характеристик, возможностей и отзывов пользователей.
Оригинал: Best Flight Controllers For Mini Quad & Racing Drones
Несмотря на то, что я хочу помочь вам выбрать ПК, всё равно потратьте время и изучите статью про то, как выбирать контроллер.
Полный список характеристик всех полетных контроллеров. Если хотите — сравнивайте их более детально.
Прежде чем выбрать ПК, нужно определиться какую прошивку вы будете использовать, потому как многие полетные контроллеры можно использовать только с одной прошивкой.
Лично я советую новичкам использовать Betaflight, это одна из самых распространенных прошивок, и в интернете есть сотни сайтов про неё, а чем больше прошивка популярна, тем большее количество людей сможет вам помочь в решении каких-либо проблем.
Другие топовые комплектующие смотрите тут: «Топ 5 Лучших«.
Лучшие полетные контроллеры на Betaflight (5 штук)
Основные характеристики полетных контроллеров в нашем списке:
- Цена в районе $30-$40
- Микроконтроллер F3 или F4
- Гироскопы MPU6000 или ICM
- MicroCD слот или память для blackbox
- Наличие Betaflight OSD
- Встроенная PDB
- Датчик тока
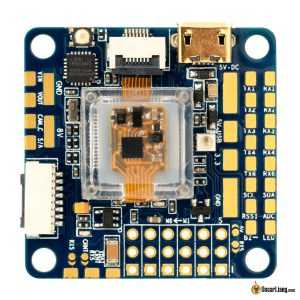
CL Racing F7

- F7, ICM20602 (32K Gyro)
- Антивибрационное крепление
- Betaflight OSD
- PDB
- 5V/1.5A BEC
- 128MB памяти для черного ящика (Blackbox)
- Напряжение питания: 2S — 8S LiPo
CL Racing F7 — это преемник популярных моделей CL Racing F4 и F4S. У него похожий дизайн, удобное расположение элементов и нормальный размер контактных площадок.
Это один из наиболее доступных полетных контроллеров в нашем списке, и при этом у него отличный набор функций. CL Racing F7 разработан специально для работы совместно с регуляторами «4-в-1». Разъем для регулей позволяет использовать их телеметрию, а также общий датчик тока.
CL Racing F7 — один из первых ПК с функцией VTX pitmode, эта функция позволяет вам включать/выключать видеопередатчик тумблером на аппе.
Несмотря на то, что установлены гироскопы серии ICM, я не заметил колебаний коптера при частоте 32к (которые обычно были при использовании более старых полетных контроллеров).
Вот полный обзор.
Купить на: Banggood | Amazon | RDQ | AliExpress
Holybro Kakute F7 AIO

- F7, ICM20689 SPI (32KHz Looptime)
- Софтмаунт датчиков
- Betaflight OSD
- Встроенная PDB
- 5 В / 2 А BEC
- MicroSD слот для blackbox
- Питание: 2S – 6S
У большинства ПК антивибрационное крепление используется для всей платы, но у Kakute F7 плата с гироскопами демпфируется отдельно. Т.е. не нужно беспокоиться о демпферах, они уже есть. Гироскопы ICM относительно более шумные, но я не стал бы беспокоиться об этом, из-за довольно эффективного софтмаунта.
Недостаток этой системы — нужно убедиться, что гироскопы ничего не касаются, чтобы не передавались вибрации. Т.е. вы не можете разместить сверху другие комплектующие типа приемника или видеопередатчика.
Если в ПК установлен процессор серии F4, то приходится возиться с инверсией сигнала для SmartPort телеметрии и для SBUS. Это не проблема если у вас проц F7, т.к. инверсия настраивается программно.
Ещё мне очень нравится расположение элементов на плате; шикарный функционал, без усложнения системы.
Беспокойство вызывает только шлейф, который можно повредить при крашах. Его можно заменить, тем более что в комплекте есть запасной. Однако это требует некоторых навыков пайки. Замечу, что я использую платы Kakute более года и пока не было нужды менять шлейф.
Думаю, этот ПК подойдет опытным пилотам, которым нужна высокая скорость работы гироскопов и частота 32к.
Есть и не AIO версия, которую можно использовать вместе с регуляторами 4-в-1.
Обзор | Купить на Banggood | AliExpress | Gearbest | GetFPV
Airbot OmniNXT F7 FC
На ПК Airbot OmniNXT F7 доступен весь функционал последней версии Betaflight при этом частота может быть 32k (looptime). Нет это не ПК «все-в-одном», для него нужна PDB или регуляторы «4-в-1».
В полётнике два набора датчиков, MPU6000 — для частоты 8К с низким уровнем шума и ICM20608 для частоты 32к. На плате есть два стабилизатора: 5 вольт и 8 вольт для видеопередатчика и камеры. Расположение контактов довольно удобное.
Купить на: Banggood | Amazon | GetFPV | AliExpress
Omnibus Fireworks V2

- F4
- ICM20608 на отдельной плате с демпферами
- Betaflight OSD
- Встроенный датчик тока
Полетные контроллеры Omnibus F3 и F4 были одними из самых популярных и надежных плат в индустрии дронрейсинга довольно долгое время.
В Omnibus Fireworks V2 меня привлек дизайн разъемов для регулей. Вы получаете питание, сигнал и телеметрию по углам платы, что сильно упрощает пайку и сборку.
Кроме того, гироскопы демпфированы каким-то гелем и хорошо защищены пластиковым корпусом. Гироскопы ICM20608 работают с частотами до 32 кГц. Думаю, вы даже можете сами заменить гироскопы, т.к. они подсоединены шлейфом.
Купить на Banggood
Matek F405 и FCHub VTX
Matek F405 — это простой полетный контроллер с Betaflight OSD и слотом для MicroSD. У него нет PDB, но его можно подключить к FCHUB VTX используя шлейф.
Комбо-набор Matek F405 и FCHUB VTX — это тоже самое, что ПК, PDB и видеопередатчик, но с некоторыми реально хорошими улучшениями. Перенос элементов с большими токами и напряжениями подальше от процессора и гироскопов дают вам более чистый сигнал, улучшает летные характеристики и надежность. ПК и PDB можно закрепить при помощи демпферов, при этом не будет тяжелых проводов, передающих вибрации.
По шлейфу в том числе передается и сигнал управления видеопередатчиком, так что можно менять частоты и выходную мощность при помощи аппаратуры управления.
Однако, если вам нужен видеопередатчик с большой мощностью или с режимом PitMode, тогда FCHUB не для вас. Кроме того, ваша рама должна иметь место для установки стека из двух плат.
Купить
KISS (1 плата)
Из-за того, что прошивка без исходного кода, пользователи не имеют выбора.
Kiss FC V2
- Процессор F7, гиры MPU6000
- Идет с прошивкой KISS FC Firmware
После 2х лет ожидания, Flyduino наконец-то выпустила KISS V2 для замены первой версии ПК. У KISS огромная толпа фанатов, которым нравятся характеристики этих ПК. Когда вы платите $80 за KISS FC V2, то вы платите не только за железо, но и за закрытую прошивку, которая работает только на ПК KISS.
Лично я считаю, что KISS летает плавнее и мягче, чем Betaflight, которая летает более точно (больше похоже на движения робота). Не самое точно описание, но как уж смог.
Это один из первых контроллеров, сделанных в виде буквы «H» и с контактными площадками для подпаивания проводов. А еще они же первыми заменили сквозные отверстия для штыревых разъемов на плоские пятаки для пайки с обеих сторон платы.
Во второй версии улучшено расположение контактов, теперь регули подключаются по углам платы. Имеющийся разъем также упростит проводку при использовании определенных PDB. Установка и настройка значительно проще, чем Betaflight.
На KISS можно поставить Betaflight, но, по-моему, есть и другие, более удачные ПК для Betaflight. Причина выбора KISS — это их закрытая прошивка.
Купить GetFPV | Обзор.
Raceflight (1 плата)
До того, как исходники прошивки стали закрытыми, была поддержка и других ПК. Думаю, что они идут по пути KISS и не оставят своим пользователям выбора, кроме как использовать только их железо.
Revolt F4

- Процессор F4, гиры Invensense 20602
- Разработан для Raceflight
ПК Revolt F4 разработан командой Raceflight и специально для Raceflight. Используется самая большая частота обновления данных с гироскопов — до 32 кГц.
Кто-то может не согласиться с мнением «быстрее — значит лучше», но многие пользователи были впечатлены полетом на Revolt F4 с прошивкой Raceflight. Их софт: RF1 (Raceflight One) также развивается в сторону упрощения настройки коптера пользователем.
Revolt F4 — это просто ПК безо всяких свистелок и перделок. Даже встроенного BEC нет, т.е. ему требуется внешнее питание (и дополнительный контакт BAT+ для контроля напряжения на аккумуляторе). RF объясняют это тем, что хотели минимизировать шумы. Но обычно в таких случаях пользователи жалуются на усложнение процесса сборки.
С тех пор появились несколько новых версий этого ПК с доп. функциями, например RevoltOSD, с поддержкой питания напрямую от LiPo аккумулятора, с OSD, а также Minivolt — по сути уменьшенную версию Revolt.
Кстати говоря, Lumenier Skitzo FC— это Revolt после ребрендинга, это та же самая плата, только другого цвета и с другой ценой.
Купить:
Прочие топовые контроллеры из прошлого
Нижеследующий список содержит контроллеры из нашего прошлого, они не попали в основные списки из-за других, более новых ПК. Однако я хочу их упомянуть, потому что в некоторых случаях их стоит иметь в виду при покупке.
Matek F405 CTR
- F4, MPU6000
- Betaflight OSD
- Встроенная PDB
- 5 UART
- Слот для MicroSd флэшки
- BEC: 5V/2A
CTR — это новая версия Matek F405 AIO.
AIO — довольно хороший ПК с отличным функционалом и удобным расположением элементов. Однако, было довольно много жалоб на рывки по курсу и сильные вибрации, из-за очень чувствительных к шуму гироскопов.
И вот, наконец, Matek решили заменить гироскопы, на более устойчивые к шуму MPU6000, ну и добавили ещё кое-какие улучшения. Прочитав наш обзор, вы узнаете, почему это один из лучших ПК для Betaflight и iNav.
Купить на Banggood | AliExpress | Обзор
DYS F4 Pro
- F4, MPU6000 SPI
- Софтмаунт
- Betaflight OSD
- Встроенная PDB
- 5 В / 3 А BEC
- 8MB памяти для blackbox
- Питание: 2S – 6S
По функционалу DYS F4 очень похож на Kakute F4. Отличное расположение элементов, контактные площадки для силовых проводов (питание, регули) выступают за пределы платы, что упрощает пайку.
Только один последовательный порт с аппаратной инверсией сигнала для SBUS. Если нужна телеметрия, то придется использовать неинвертированный сигнал. Для тех, кто не планирует использовать Smart Port — это не проблема, это просто еще один дополнительный порт для прочих устройств (инвертированный UART нельзя использовать для других устройств).
Купить на Banggood | AliExpress | Обзор
История изменений
- март 2017 — первая версия статьи
- июль 2017 — обновление статьи, сделаны отдельные разделы для разных прошивок (BF, RF, KISS), добавлены DYS F4, Kakute F4, Matek F4; убраны Lux V2 и DRC Soul
- Январь 2018 — обновил список
- Август 2018 — обновление списка: Kakute F7, Fireworks V2
- Ноябрь 2018 — CL Racing F4S заменен на F7
blog.rcdetails.net
|
Тарот Контроллер шасси
Сегодня хотелось бы рассказать Tarot TL8X Это чудо китайской электронной промышленности направленной на потребительский рынок игрушек. Инструкция по эксплуатации минимальна, она не раскрывает “секретов” изобретения. Контроллер шасси вещь необходимая особенно тогда когда алгоритм его работы предсказуем и может быть модифицирован пользователем своего рода открытый код open source. В этой обзорной статье я решил поделиться с русскоговорящим сегментом сети принципом работы этого устройства а также мной написанным кодом управления микроконтроллером STM32F103 который является ядром всей системы. В будущем можно было бы доработать код что бы он считывал mavlink сообщения и поднимал шассии автоматически на определенной пользователем высоте Подробнее | 3 комментария | 172 просмотраТеги: tl8x002, tl8x, tarot, tarot, landing, gear, controller, auto |
|
|
|
|
|
Топ 5 лучших полетных контроллеров
Подборка полетных контроллеров квадрокоптеров это года и топа из предыдущих лет. Подробнее | 0 комментариев | 405 просмотровТеги: полетный контроллер, top 5 |
|
|
Обзор Matek F405-CTR
Matek Systems BetaFlight F405-CTR – это один из лучших полетных контроллеров для дальнолетов, небольших FPV квадрокоптеров и полетов по GPS. Подробнее | 0 комментариев | 4012 просмотровТеги: matek f405, matek, f405 ctr |
|
|
Обзор Omnibus F7 V2
Полетный контроллер Omnibus F7 V2 Flight Controller STM32 F745 MCU 2-4S Built in Betaflight OSD Dual Gyro 30.5×30.5mm for RC Drone. Подробнее | 0 комментариев | 1977 просмотров Теги: полетный контроллер, omnibus f7, omnibus, flight controller |
|
|
Omnibus F7 Pro Flight Controller
Обзор полетного контроллера Omnibus F7 Pro. Подробнее | 0 комментариев | 1418 просмотров Теги: полетный контроллер, omnibus f7, omnibus |
|
|
Зуммер на CC3D
Подключение пищалки (buzzer) на контроллере полета CC3D. Подробнее | 0 комментариев | 6078 просмотровТеги: cc3d, betaflight |
|
|
Обзор Tarot ZYX-M Flight Controller
Полетный контроллер для квадрокоптера от фирмы Tarot. Подробнее | 0 комментариев | 11684 просмотра Теги: полетный контроллер, инструкция, tarot |
|
|
|
|
|
Обзор CC3D OpenPilot
Обзор контроллера полета и как настроить CC3D OpenPilot. Подробнее | 21 комментарий | 36265 просмотровТеги: полетный контроллер, cc3d |
|
|
Дешевый GPS с компасом для Naza
Не дорогой модуль GPS для Naza Lite и Naza-M V2. Подробнее | 1 комментарий | 11082 просмотраТеги: naza, gps |
|
|
Обзор JIYI P2 Flight Controller – убийца Naza-M V2
Новый полетный контроллер для мультикоптера JIYI P2. Видеоинструкция подключения и настройки. Подробнее | 2 комментария | 11208 просмотровТеги: полетный контроллер, jiyi p2 |
|
|
KK Multicopter c экраном
Обзор семейства контроллеров KK2.1 Multirotor LCD. Подробнее | 1 комментарий | 8680 просмотровТеги: полетный контроллер, kk multicopter |
|
|
Где купить Naza-M Lite
Обзор младшей версии Naza и ссылка на ее покупку. Подробнее | 0 комментариев | 6916 просмотровТеги: naza lite, naza |
|
|
Обзор контроллера полетов KK Multicopter
KK Multicopter — это самый дешевый контроллер, который поддерживает до 6ти моторов и может управлять как квадрокоптерами, так и бикоптерами и моделями самолетов. Подробнее | 12 комментариев | 19249 просмотровТеги: полетный контроллер, kk multicopter |
quad-copter.ru
Летательная болезнь — Полётный контроллер. — DRIVE2
Добрый день!
Итак, я определился с размером, и рамой. Самое время поговорить о выборе полётного контроллера.
Казалось бы, чего проще! Ан нет. Сложность, как всегда, в выборе 🙂
Оказалось что в полётных контроллерах есть даже своя специализация, куча нюансов, и прочего.
Я не особо углублялся в эту тему ибо сразу купил полётный контроллер не думая и не выбирая. Поэтому получилось быстро и безболезненно. А если вдуматься …
Короче если начинать думать о контроллерах то выходит примерно следующее.
Есть контроллеры умные и дорогие, например те, что ставят в квадры фирмы DJI .

DJI A2
Там вроде в третьей серии уже ультрозвуковые датчики — чтобы летать по замкнутым пространствам и не натыкаться на стены. Оптические датчики, чтобы зависать на одном месте, датчики посадки — которые могут определить неровности на земле, типа человека, и увести квадру наверх, для принятия решения. Ну и так далее.
Думаю такое навороченное мне пока не надо, да и куда это на мою 250-ю раму 🙂
Дальше идут контроллеры типа ardupilot mega.

Полный размер
ArduPilot
На самом деле их там много всяких, но больше всего мелькают Ardupilot . На самом деле довольно продвинутые контроллеры. Умеют использовать GPS для навигации, летать по точкам, возвращаться, в случае чего, обратно к вам, ну или обратно в Китай, тут как спутники лягут 🙂
Обычно их используют в средних квадрах 350 — 450 размера. А такие квадры, как мы помним используются в основном для видеосъемки. Могут плавно перемещаться не реагируя на ветер. Оснащаются кучей навесных датчиков, функционал которых ограничен лишь вашим воображением. Туда уже можно воткнуть барометр, для автоматического поддержания высоты в пределах десятка сантиметров. Я даже видел оптические датчики перемещения относительно земли. Короче прикольный конструктор. Когда буду делать 450 квадру для видеосъемки — поставлю такой. Но мне на 250-ку он крутоват, великоват и тяжеловат.
Ну и мелкие контроллеры типа openpilot (плата CC3D).
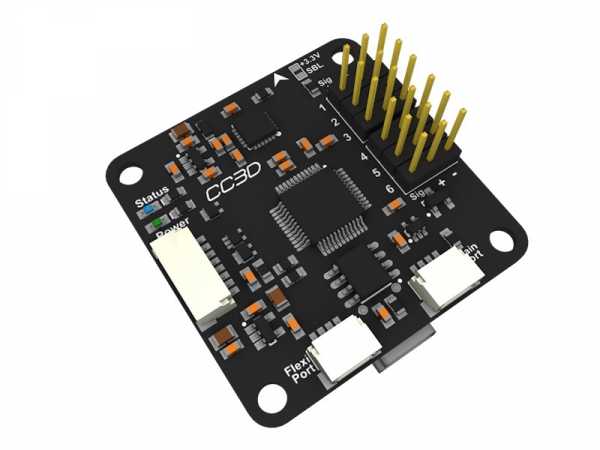
CC3D
Это немного порезанные по сравнению с ardu pilot mega контроллеры. Зато они маленькие, удобные, и легкие. Они в оригинале не умеют летать по точкам, хотя к ним и можно подключить GPS. Всё остальное в ручном режиме. И поверьте — это совсем не страшно 🙂 Кстати сюда бы я отнёс и такие контроллеры как Naze32.
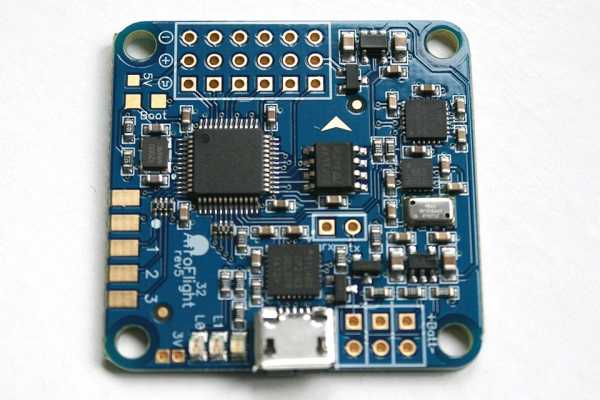
Полный размер
NAZE 32
Как я и говорил, у меня всё было проще. Я не задумываясь особо взял CC3D (openpilot) просто потому, что он рекомендовался продавцом к выбранной раме. Так как это для меня игрушка, то какая разница что ломать?! Да и Али предлагает эти контроллеры весьма дёшево. Правда сразу могу предупредить, качество сборки вас может немного разочаровать. Практически после второго подключения провода в контроллер, у меня отвалился miniUSB разъём. Пришлось брать паяльник и припаивать на место. После этого я всю плату залил спец лаком, во первых вода будет не страшна, а во вторых от вибрации ничего не отвалится, ибо приклеено !
Теперь другие вкусности этого контроллера.
Штуковина разрабатывалась как контроллер для FPV коптеров, причём со спорт уклоном. (Такое в форумах вычитал).
Контроллер умеет общаться с телеметрией, OSD (On-screen display) и GPS .
Контроллер умеет общаться с подвесом камеры, для компенсации наклонов квадры.
Контроллер имеет сторонние прошивки которые добавляют ему много разных фишек, в том числе и возврат к месту старта при пропадании сигнала.
Из форумов вычитал, что тот же Naze32 почти тоже самое. Вроде легче настраивается на полет. Хотя если пользоваться предоставленными в CC3D темплейтами всё тоже очень просто. Ну по крайней мере для начала.
Ну и напоследок пару советов. Если вы купили CC3D обязательно крепите его к раме плотно, двухсторонним скотчем. Этот контроллер предназначен именно для жёсткого крепежа, а если вы выбрали Ardupilot Mega, то крепите его на специальной демпфирующей платформе. Этот контроллер боится вибраций.

Полный размер
Демпфирующая площадка.
Ну это так, из наблюдений 😉 Далее, если вы купили CC3D поставьте его на квадру повернув на 90 гр. Так, чтобы разъем USB смотрел вбок. Удобнее будет подключать провод. Ориентацию контроллера можно будет потом задать в установках.
Обратите внимание, что команда OpenPilot разделилась на 2 части. Одна, по слухам, ушла в спорт контроллеры, а вторая продолжает развивать обычные CC3D. Они теперь называются LibrePilot. Они так-же выпустили и поддерживают новые платы контроллеров OpenPilot Revolution, OpenPilot Revo Nano и ещё чего-то там. Но я пока это в руках не крутил.

OpenPilot Revolution
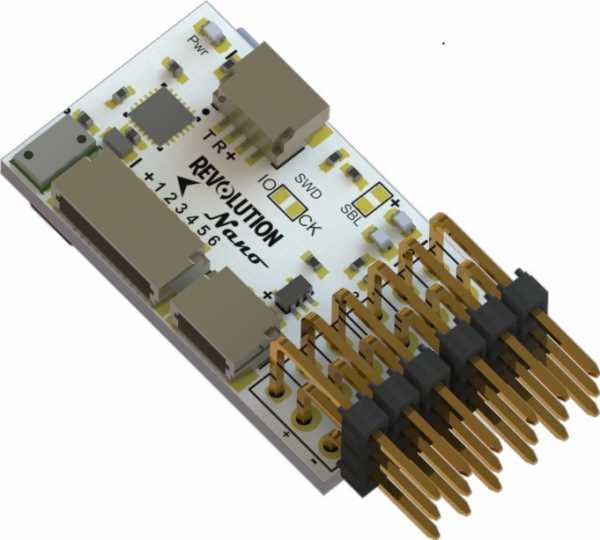
OpenPilot Revo Nano
А про настройку наверно позже напишу, хотя не уверен надо ли. Описаний куча в интернете.
www.drive2.ru
Топ 5 лучших полетных контроллеров
Здесь будут перечислены несколько лучших полетных контроллеров (ПК) для гоночных мини коптеров с прошивками Betaflight, KISS и Raceflight, выбор сделан исходя из их характеристик, возможностей и отзывов пользователей.
Оригинал: Best Flight Controllers For Mini Quad & Racing Drones
Несмотря на то, что я хочу помочь вам выбрать ПК, всё равно потратьте время и изучите статью про то, как выбирать контроллер.
Полный список характеристик всех полетных контроллеров. Если хотите — сравнивайте их более детально.
Прежде чем выбрать ПК, нужно определиться какую прошивку вы будете использовать, потому как многие полетные контроллеры можно использовать только с одной прошивкой.
Лично я советую новичкам использовать Betaflight, это одна из самых распространенных прошивок, и в интернете есть сотни сайтов про неё, а чем больше прошивка популярна, тем большее количество людей сможет вам помочь в решении каких-либо проблем.
Другие топовые комплектующие смотрите тут: «Топ 5 Лучших«.
Лучшие полетные контроллеры на Betaflight (5 штук)
Основные характеристики полетных контроллеров в нашем списке:
- Цена в районе $30-$40
- Микроконтроллер F3 или F4
- Гироскопы MPU6000 или ICM
- MicroCD слот или память для blackbox
- Наличие Betaflight OSD
- Встроенная PDB
- Датчик тока
CL Racing F7

- F7, ICM20602 (32K Gyro)
- Антивибрационное крепление
- Betaflight OSD
- PDB
- 5V/1.5A BEC
- 128MB памяти для черного ящика (Blackbox)
- Напряжение питания: 2S — 8S LiPo
CL Racing F7 — это преемник популярных моделей CL Racing F4 и F4S. У него похожий дизайн, удобное расположение элементов и нормальный размер контактных площадок.
Это один из наиболее доступных полетных контроллеров в нашем списке, и при этом у него отличный набор функций. CL Racing F7 разработан специально для работы совместно с регуляторами «4-в-1». Разъем для регулей позволяет использовать их телеметрию, а также общий датчик тока.
CL Racing F7 — один из первых ПК с функцией VTX pitmode, эта функция позволяет вам включать/выключать видеопередатчик тумблером на аппе.
Несмотря на то, что установлены гироскопы серии ICM, я не заметил колебаний коптера при частоте 32к (которые обычно были при использовании более старых полетных контроллеров).
Вот полный обзор.
Купить на: Banggood | Amazon | RDQ | AliExpress
Holybro Kakute F7 AIO

- F7, ICM20689 SPI (32KHz Looptime)
- Софтмаунт датчиков
- Betaflight OSD
- Встроенная PDB
- 5 В / 2 А BEC
- MicroSD слот для blackbox
- Питание: 2S – 6S
У большинства ПК антивибрационное крепление используется для всей платы, но у Kakute F7 плата с гироскопами демпфируется отдельно. Т.е. не нужно беспокоиться о демпферах, они уже есть. Гироскопы ICM относительно более шумные, но я не стал бы беспокоиться об этом, из-за довольно эффективного софтмаунта.
Недостаток этой системы — нужно убедиться, что гироскопы ничего не касаются, чтобы не передавались вибрации. Т.е. вы не можете разместить сверху другие комплектующие типа приемника или видеопередатчика.
Если в ПК установлен процессор серии F4, то приходится возиться с инверсией сигнала для SmartPort телеметрии и для SBUS. Это не проблема если у вас проц F7, т.к. инверсия настраивается программно.
Ещё мне очень нравится расположение элементов на плате; шикарный функционал, без усложнения системы.
Беспокойство вызывает только шлейф, который можно повредить при крашах. Его можно заменить, тем более что в комплекте есть запасной. Однако это требует некоторых навыков пайки. Замечу, что я использую платы Kakute более года и пока не было нужды менять шлейф.
Думаю, этот ПК подойдет опытным пилотам, которым нужна высокая скорость работы гироскопов и частота 32к.
Есть и не AIO версия, которую можно использовать вместе с регуляторами 4-в-1.
Обзор | Купить на Banggood | AliExpress | Gearbest | GetFPV
Airbot OmniNXT F7 FC
На ПК Airbot OmniNXT F7 доступен весь функционал последней версии Betaflight при этом частота может быть 32k (looptime). Нет это не ПК «все-в-одном», для него нужна PDB или регуляторы «4-в-1».
В полётнике два набора датчиков, MPU6000 — для частоты 8К с низким уровнем шума и ICM20608 для частоты 32к. На плате есть два стабилизатора: 5 вольт и 8 вольт для видеопередатчика и камеры. Расположение контактов довольно удобное.
Купить на: Banggood | Amazon | GetFPV | AliExpress
Omnibus Fireworks V2

- F4
- ICM20608 на отдельной плате с демпферами
- Betaflight OSD
- Встроенный датчик тока
Полетные контроллеры Omnibus F3 и F4 были одними из самых популярных и надежных плат в индустрии дронрейсинга довольно долгое время.
В Omnibus Fireworks V2 меня привлек дизайн разъемов для регулей. Вы получаете питание, сигнал и телеметрию по углам платы, что сильно упрощает пайку и сборку.
Кроме того, гироскопы демпфированы каким-то гелем и хорошо защищены пластиковым корпусом. Гироскопы ICM20608 работают с частотами до 32 кГц. Думаю, вы даже можете сами заменить гироскопы, т.к. они подсоединены шлейфом.
Купить на Banggood
Matek F405 и FCHub VTX
Matek F405 — это простой полетный контроллер с Betaflight OSD и слотом для MicroSD. У него нет PDB, но его можно подключить к FCHUB VTX используя шлейф.
Комбо-набор Matek F405 и FCHUB VTX — это тоже самое, что ПК, PDB и видеопередатчик, но с некоторыми реально хорошими улучшениями. Перенос элементов с большими токами и напряжениями подальше от процессора и гироскопов дают вам более чистый сигнал, улучшает летные характеристики и надежность. ПК и PDB можно закрепить при помощи демпферов, при этом не будет тяжелых проводов, передающих вибрации.
По шлейфу в том числе передается и сигнал управления видеопередатчиком, так что можно менять частоты и выходную мощность при помощи аппаратуры управления.
Однако, если вам нужен видеопередатчик с большой мощностью или с режимом PitMode, тогда FCHUB не для вас. Кроме того, ваша рама должна иметь место для установки стека из двух плат.
Купить
KISS (1 плата)
Из-за того, что прошивка без исходного кода, пользователи не имеют выбора.
Kiss FC V2
- Процессор F7, гиры MPU6000
- Идет с прошивкой KISS FC Firmware
После 2х лет ожидания, Flyduino наконец-то выпустила KISS V2 для замены первой версии ПК. У KISS огромная толпа фанатов, которым нравятся характеристики этих ПК. Когда вы платите $80 за KISS FC V2, то вы платите не только за железо, но и за закрытую прошивку, которая работает только на ПК KISS.
Лично я считаю, что KISS летает плавнее и мягче, чем Betaflight, которая летает более точно (больше похоже на движения робота). Не самое точно описание, но как уж смог.
Это один из первых контроллеров, сделанных в виде буквы «H» и с контактными площадками для подпаивания проводов. А еще они же первыми заменили сквозные отверстия для штыревых разъемов на плоские пятаки для пайки с обеих сторон платы.
Во второй версии улучшено расположение контактов, теперь регули подключаются по углам платы. Имеющийся разъем также упростит проводку при использовании определенных PDB. Установка и настройка значительно проще, чем Betaflight.
На KISS можно поставить Betaflight, но, по-моему, есть и другие, более удачные ПК для Betaflight. Причина выбора KISS — это их закрытая прошивка.
Купить GetFPV | Обзор.
Raceflight (1 плата)
До того, как исходники прошивки стали закрытыми, была поддержка и других ПК. Думаю, что они идут по пути KISS и не оставят своим пользователям выбора, кроме как использовать только их железо.
Revolt F4

- Процессор F4, гиры Invensense 20602
- Разработан для Raceflight
ПК Revolt F4 разработан командой Raceflight и специально для Raceflight. Используется самая большая частота обновления данных с гироскопов — до 32 кГц.
Кто-то может не согласиться с мнением «быстрее — значит лучше», но многие пользователи были впечатлены полетом на Revolt F4 с прошивкой Raceflight. Их софт: RF1 (Raceflight One) также развивается в сторону упрощения настройки коптера пользователем.
Revolt F4 — это просто ПК безо всяких свистелок и перделок. Даже встроенного BEC нет, т.е. ему требуется внешнее питание (и дополнительный контакт BAT+ для контроля напряжения на аккумуляторе). RF объясняют это тем, что хотели минимизировать шумы. Но обычно в таких случаях пользователи жалуются на усложнение процесса сборки.
С тех пор появились несколько новых версий этого ПК с доп. функциями, например RevoltOSD, с поддержкой питания напрямую от LiPo аккумулятора, с OSD, а также Minivolt — по сути уменьшенную версию Revolt.
Кстати говоря, Lumenier Skitzo FC— это Revolt после ребрендинга, это та же самая плата, только другого цвета и с другой ценой.
Купить:
Прочие топовые контроллеры из прошлого
Нижеследующий список содержит контроллеры из нашего прошлого, они не попали в основные списки из-за других, более новых ПК. Однако я хочу их упомянуть, потому что в некоторых случаях их стоит иметь в виду при покупке.
Matek F405 CTR
- F4, MPU6000
- Betaflight OSD
- Встроенная PDB
- 5 UART
- Слот для MicroSd флэшки
- BEC: 5V/2A
CTR — это новая версия Matek F405 AIO.
AIO — довольно хороший ПК с отличным функционалом и удобным расположением элементов. Однако, было довольно много жалоб на рывки по курсу и сильные вибрации, из-за очень чувствительных к шуму гироскопов.
И вот, наконец, Matek решили заменить гироскопы, на более устойчивые к шуму MPU6000, ну и добавили ещё кое-какие улучшения. Прочитав наш обзор, вы узнаете, почему это один из лучших ПК для Betaflight и iNav.
Купить на Banggood | AliExpress | Обзор
DYS F4 Pro
- F4, MPU6000 SPI
- Софтмаунт
- Betaflight OSD
- Встроенная PDB
- 5 В / 3 А BEC
- 8MB памяти для blackbox
- Питание: 2S – 6S
По функционалу DYS F4 очень похож на Kakute F4. Отличное расположение элементов, контактные площадки для силовых проводов (питание, регули) выступают за пределы платы, что упрощает пайку.
Только один последовательный порт с аппаратной инверсией сигнала для SBUS. Если нужна телеметрия, то придется использовать неинвертированный сигнал. Для тех, кто не планирует использовать Smart Port — это не проблема, это просто еще один дополнительный порт для прочих устройств (инвертированный UART нельзя использовать для других устройств).
Купить на Banggood | AliExpress | Обзор
История изменений
- март 2017 — первая версия статьи
- июль 2017 — обновление статьи, сделаны отдельные разделы для разных прошивок (BF, RF, KISS), добавлены DYS F4, Kakute F4, Matek F4; убраны Lux V2 и DRC Soul
- Январь 2018 — обновил список
- Август 2018 — обновление списка: Kakute F7, Fireworks V2
- Ноябрь 2018 — CL Racing F4S заменен на F7
blog.rcdetails.info
СОБИРАЕМ КВАДРОКОПТЕР. ПОЛЕТНЫЙ КОНТРОЛЛЕР NAZA
1 августа у меня возникла идея, которую я озвучил в ЖЖВсё! Решился! Строю!
Возникла идея построить квадрокоптер.
Оглядываясь назад мне смешно от того, каким я представлял себе процесс строительства этого беспилотника.
Почти ровно через месяц я уже с нетерпением ждал, когда же ко мне в почтовый ящик придет извещение о том, что из Китая приехала рама моего будущего квадрокоптера Tarot Ironman 650.
За это время мне удалось обнаружить хорошие тематические форумы на тему квадрокоптеростроения, пообщаться с опытными пилотами и получить ценные советы.
В итоге состав оборудования, которое необходимо для постройки квадрокптера моей мечты претерпел некоторые изменения.
11 сентября я наконец-то получил в руки коробку с рамой квадрокоптера Tarot Ironman 650 и в этот же день собрал ее.

Сегодня 20 сентября.
В Сочи последний день Международного экономического форума – мероприятия, на котором можно выпить халявной водки за счет устроителей и пожить в пятизвездочной гостинице за счет работодателя.
А на почту пришел новый пакет.
Приехал ОН!
1.
Полетный контроллер NAZA-M Light + GPS
Коробочка похожа на упаковку iPhone
2.
Открываем упаковку. Сверху лежит модуль GPS
3.
Вот что обнаружилось внутри коробки.
Модуль GPS со встроенным компасом (он по центру лежит)
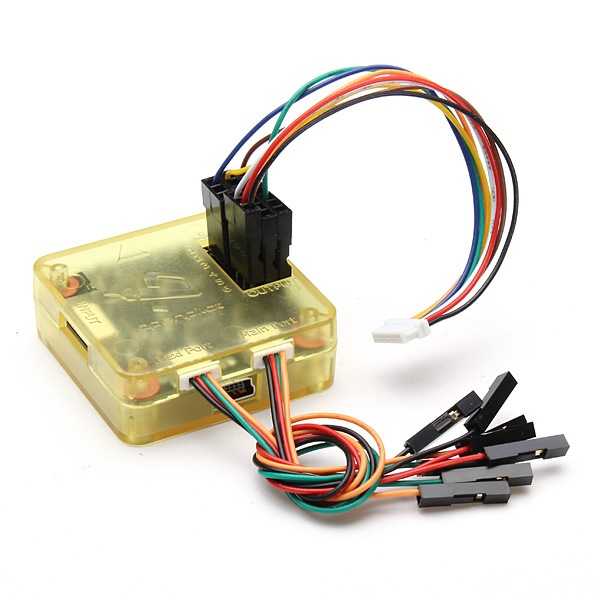
Маленькая красная коробочка с “мозгами” квадрокоптера
LED-модуль
Универсальное устройство, через которое полетный контроллер можно подключать к компьютеру для прошивки или настройки.
Кабель для прошивки и настройки контроллера
3-pin сервокабели для соединения контроллера с прочим оборудованием. А вот с каким еще предстоит выяснить.
Некоторое количество двусторонних скотчей для крепления оборудования на раме квадрокоптера
4.
А вот собственно и сам полетный контроллер Naza-M Light.
Он связывает моторы (через регуляторы, которые обозначаются аббревиатурой ESC) с передатчиком пультом управления.
Внутри этой крохотной коробочки:
– инерциальное измерительное устройство. Прямо как на настоящем летательном аппарате (или баллистической ракете “Точка-У”, к примеру).
– трехосевой акселерометр, к которому мы уже привыкли на современных смартфонах.
– трехосевой гироскоп.
– барометр.
5.
Снял верхнюю площадку на раме квадрокоптера и осторожно поместил туда полетный контроллер.
Вот тут он будет стоять.
При этом нужно обратить внимание на стрелочку, которая изображена на корпусе контроллера.
Во-первых, коробочка должна быть размещена красной наклейкой вверх.
Во-вторых, контроллер должен быть ориентирован строго стрелочкой по ходу движения квадрокоптера. То есть, там куда указывает стрелочка – перед аппарата.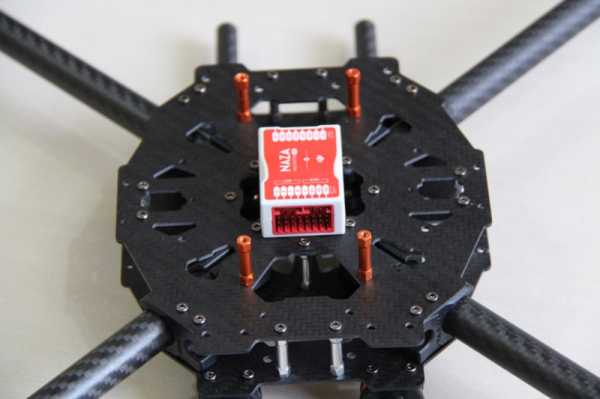
6.
Вот четыре доступных варианта компановки беспилотника, который я собираю.
Мой вариант назван QX.
То есть, Х-образный квадрокоптер.
И винты у него будут вращаться в соответствии вот с этой схемой.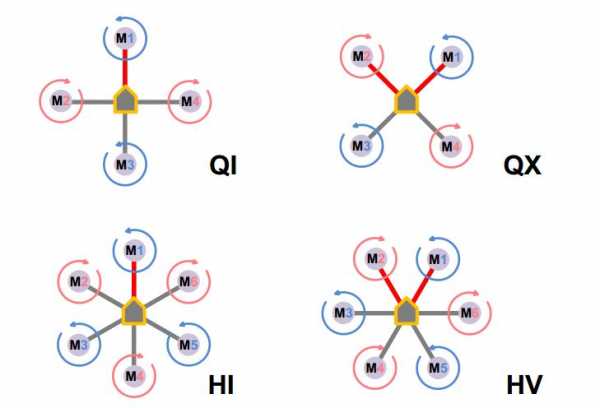
7.
На корме рамы квадрокоптера монтирую постамент под мачту GPS-приёмника.
8.
Контроллер закрываю карбоновой защитной крышкой.
9.
Примеряюсь с подключением различных систем.
10.
Схема у меня есть. Спасибо создателям интернета.
А тут можно скачать инструкцию к полетному контроллеру NAZA на русском языке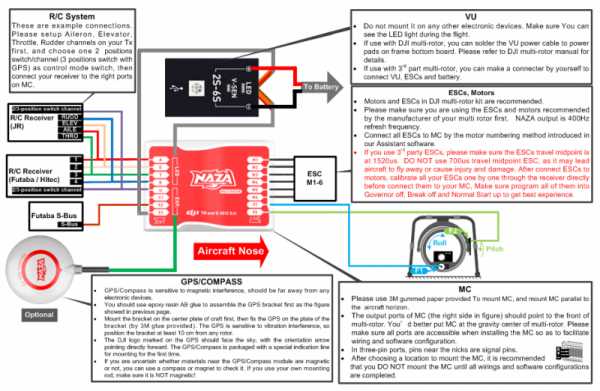
11.
На следующей неделе жду посылку с моторами Tarot TL68B17 2814 / 700KV…
12.
…и 13-дюймовыми карбоновыми пропеллерами.
13.
А вот регуляторы моторов T-Motor T30A ESC пока еще не заказал
14.
Как и еще два важных компонента – аккумулятор…
15.
…и пульт управления – 8-канальный Futaba 8FG Super
Соответственно не заказал еще запчасти и сопутствующее оборудование типа зарядных устройств и т.д.
Теперь о планах.
1. Аккумулятор я планирую приобрести в конце сентября.
2. Регуляторы я планирую приобрести в октябре.
3. Пульт управления буду покупать в ноябре.
4. Соответственно пробный полет назначен на Новый 2015 год.
5. Пробный полет будет без GoPro камеры, приобретение которой назначено на январь следующего 2015 года.
[Ну и меня спрашивали о ]1. Рама – 4 тыщи
2. Полётный контроллер – 6 тыщ
3. Моторы (уже заказал не самые топовые, но оптимальные) – 3 тыщи за все 4 штуки
4. Регуляторы моторов – 5 тыщ за все 4 штуки
5. Карбоновые пропеллеры уже заказал 4 штуки – 1 тыща
6. Аккумулятор – 4,5 тыщи
7. Аппаратура управления (8 канальник) – 17 тыщ
8. Двухосевой подвес для камеры – 2, тыщи
9. Камера – 5 тыщ (реально думаю можно и дешевле найти)
ИТОГО 48 тыщ
+ зарядные устройства и ЗИП
ВСЕГО ~ 50 тыщ
hamshenci.livejournal.com
Полетный контроллер для квадрокоптера

В данной статье мы расскажем о полетном контроллере, его преимуществах и ценовых категориях.
Содержание статьи:
Модернизация летательных устройств.

Сегодня квадрокоптеры пользуются огромной популярностью. Совсем недавно их использовали преимущественно для развлекательных целей. Однако сейчас появляется все большее количество моделей, которые вполне пригодны для творческой деятельности даже на профессиональном уровне. Квадрокоптеры есть возможность приобрести в многочисленных интернет магазинах. Их стоимость может варьироваться от самых дорогих моделей до более дешевых. Для потребителей с различным уровнем достатка обязательно найдется своя идеальная модель, которая будет подходить ему по всем параметрам. Современные пользователи имеют большие возможности для модернизации своих летательных устройств. На сегодняшний день на прилавках магазинов представлено огромное многообразие комплектующих для квадрокоптеров. Среди них выделяются контроллеры полетов. Именно они являются одними из самых основанных элементов любого устройства такого типа.
Сегодня полетные контроллеры пользуются огромной популярностью. Они подбираются индивидуально для каждой модели квадрокоптера. Они осуществляют контроль над всем процессом полета. Без данного элемента полет практически невозможно осуществить. Полетный контроллер для квадрокоптера подобрать и установить не является сложной задачей. Каждый такой элемент обладает бесплатным программным обеспечением, которое позволяет произвести настройку, чтобы устройство работало должным образом. Контроллеры обычно обладают всеми необходимыми для осуществления полета качествами. Установить контроллер для квадрокоптера можно и самостоятельно, и при помощи специалиста. Каждый пользователь решает этот момент самостоятельно.
Установка контроллера.

После подбора оптимального для определенной модели квадрокоптера полетного контроллера, его нужно правильным образом установить, чтобы он функционировал в нормальном режиме. Главным правилом установки контроллеров является то, что они должны располагаться вровень с плоскостью вращения пропеллеров устройства. Обязательным условием при этом является виброизоляция. Она необходима для того чтобы квадрокоптер имел возможность без труда взлетать и осуществлять различные трюки. Для тех моделей контроллеров, которые относятся к высокому ценовому диапазону не обязательно устанавливать виброизоляцию, потому что они уже оснащены ею.

С полетными контроллерами любой квадрокоптер будет летать таким образом, который является наиболее оптимальным для конкретного пользователя. Благодаря программному обеспечению можно установить любые параметры полета. Полетные контроллеры для летательных устройств обладают привлекательной стоимостью. Иногда в комплектации поставляют и корпусы для полетных контроллеров. В некоторых интернет магазинах их можно приобрести отдельно. Их стоимость является бюджетной. Для контроллеров так же следует приобрести отдельно GPS модуль, который позволит определять местоположение устройства.
Распаковка контроллера полета APM 2.6.
Возможно, вам будет интересно:
kvadrokopterpro.ru
