
Драйвер моторов двухканальный L298N. Dual DC Motor Driver RKP-MDL298-01A-V2 – Драйверы двигателей
| Есть в наличии Есть в наличии | ||
| ||
Модуль управления моторами RKP-01A на микросхеме L298N. С его помощью можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов) или одного двухобмоточного четырехпроводного шагового двигателя.
Здесь можно посмотреть подробную статью о подключении драйвера моторов на микросхеме L298N к Arduino =>>
Плата контроллера двигателей RKP-01A благодаря микросхеме драйвера моторов L298N позволяет легко управлять двумя электромоторами использующими питание от 5В до 35В. Установленный на основную микросхему L298N радиатор охлаждения позволяет выдерживать ток нагрузки до 2A на канал. Для защиты драйвера моторов от перегрузки используются специальные Диоды Shotki. Модуль контроллера двигателей позволяет использовать его в различных робототехнических проектах, размещая его по своему усмотрению.
Ключевыми особенностями драйвера моторов RKP-01A являются наличие радиатора охлаждения L298N, малые габариты и вес (35 грамм), а также светодиодная индикация наличия питания и указания направления вращения двигателей.
Характеристики драйвера моторов RKP-01A на микросхеме L298N:
– Микросхема драйвера: L298N (с радиатором охлаждения)
– Возможность питания внешней логики (Vss): +5V ~ +7V (внутренний стабилизатор +5В)
– Входное напряжение логической части (Vd): от 6V до 12V
– Входное напряжение управляемой части (Vs): от +5V до +35V
– Рабочий ток внешней логической части (Iss): 0 ~ 36mA
– Ток нагрузки каждой управляемой части (Io): 2A
– Пиковый ток нагрузки каждой управляемой части (Io): 3А
– Максимальная потребляемая мощность: 20Вт (при температуре = 75°C)
– Высокий уровень входного управляющего сигнала (High): 2.3В = Vin = Vss
– Рабочая температура окружающей среды: от -25 до +130°C
– Размеры модуля со стойками крепления и радиатором L298: 53 x 47 x 27 мм
– Вес драйвера моторов RKP-01A: 35 грамм
Плата контролера двигателей имеет четыре специальных отверстия и специальные стойки крепления, выполненные из латуни.
Плата расширения RKP-01A может используется вместе с Arduino и устанавливается отдельно от процессорного модуля Arduino. Применяется, например, для построения движущихся роботов на колесном или гусеничном приводе.
Для подключения моторов постоянного тока (DC-моторов) служат порты:
OUT1 и OUT2 – мотор A
OUT3 и OUT4 – мотор B
(управление электромоторами полностью независимо друг от друга)
Для работы подключите источник питания к контакту тройного клемника “VСС”.
При подаче питания от +6V до +12V и одетом джампере JP1, питание подается и на стабилизатор, который выдает +5V для питания логики драйвера. Подавать отдельно питание +5V для логики не нужно.
Управление DC-моторами осуществляется через специальные входы:
ENA (ENB) – надетая перемычка активирует включение канала управления двигателем.
ENA (ENB) – соединить с ШИМ-выходом MCU, для контроля скорости вращения
I1 (I3) и I2 (I4) – логические входы (имеют отключаемые подтягивающие резисторы) задания направления вращения (см. таблицу ниже)
ENA I1 I2 Состояние мотора А
PWM>0 0 0 Стоп
PWM>0 0 1 Вращение по часовой
PWM>0 1 0 Вращение против часовой
PWM>0 1 1 Стоп
ENB I3 I4 Состояние мотора BЛогика управления шаговым двигателем выглядит следующим образом: A, B, C, D, это четыре обмотки шагового двигателя.
PWM>0 0 0 Стоп
PWM>0 0 1 Вращение по часовой
PWM>0 1 0 Вращение против часовой
PWM>0 1 1 Стоп
Диаграмма ниже (четыре фазы шагового двигателя).
Управление шаговым двигателем осуществляется аналогично управлению двумя DC-моторами.
Схема драйвера моторов L298N для робота с управлением от микроконтроллера.
Нажать и посмотреть схему =>>
Товар был добавлен в наш каталог Среда, 04 Октября 2017
robot-kit.ru
Корпус: Multiwatt15
| L2938N – представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4.5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы. В L298 существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи. Микросхемы L298N имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Расположение выводов L298N: 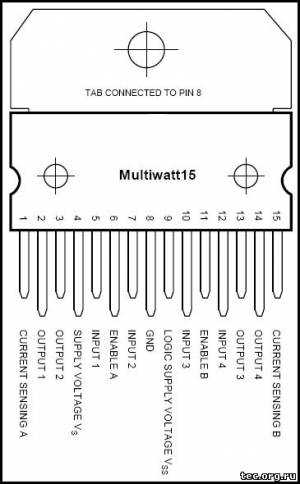 | Назначение выводов L298N:
Логическая таблица работы L298N
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
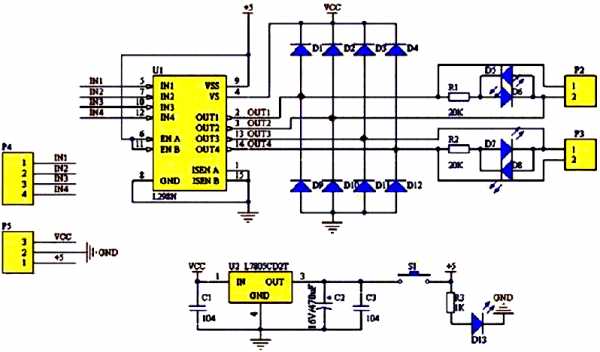
Структурная схема L298N 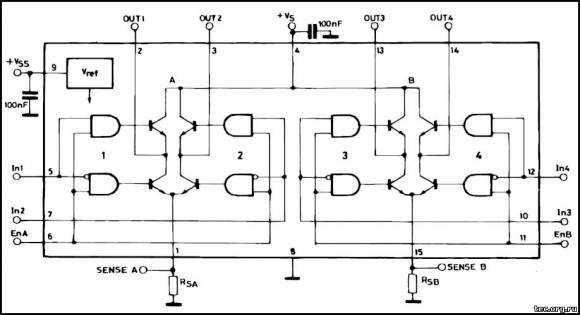
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Предельно допустимые режимы L298
| Основные параметры L298:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Типовые схемы использования драйвера L298N Использование внешних диодов для индуктивных нагрузок (моторов, реле, электромагнитов) обязательно! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Управление однонаправленными двигателями 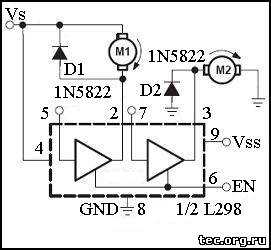
H – высокий уровень, L – низкий уровень, X – произвольно.
|
Управление двунаправленным двигателем 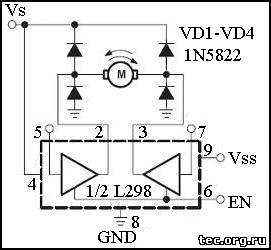
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и L298N: 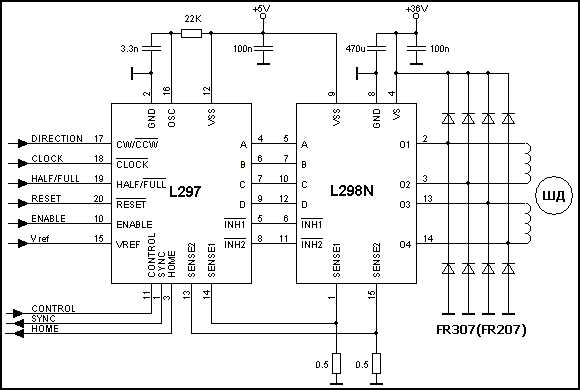 (Рекомендуется использовать быстрые диоды с Tвосст.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Более подробное описание микросхемы L298N с электрическими характеристиками и диаграммами работы и схемами включения Вы можете получить скачав файл документации ниже (Datasheet на английском языке). | Ссылки: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
tec.org.ru
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода — и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения — Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным — не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
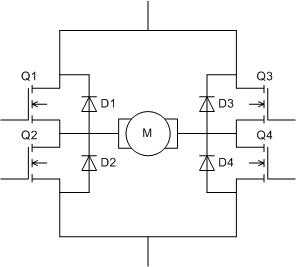 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
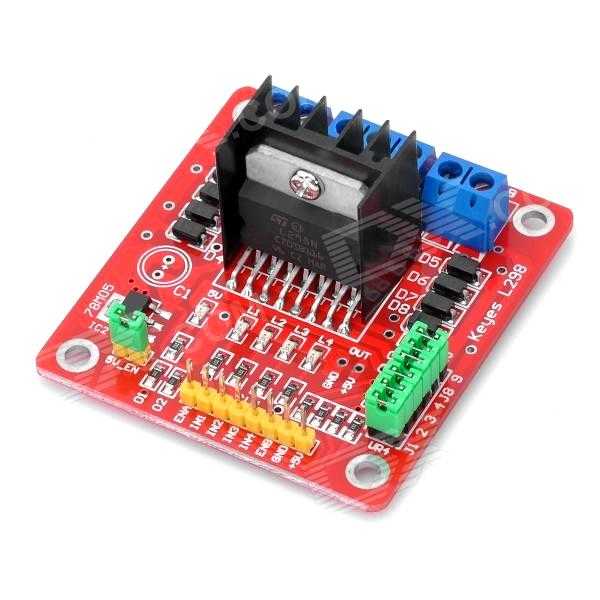
Плата выглядит следующим образом:

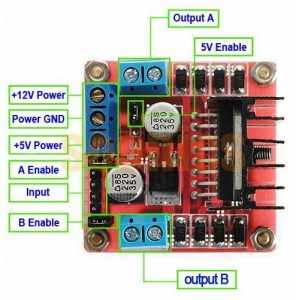
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
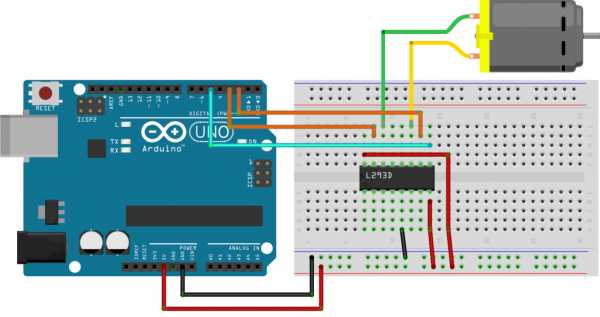
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V — 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
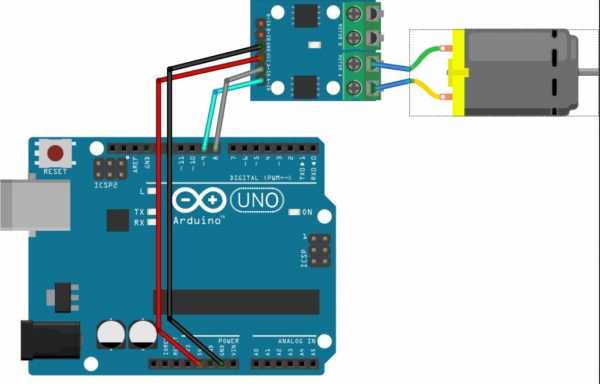
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc — напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB — вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
arduinomaster.ru
L298N подключение к Ардуино – RadioRadar
Справочник
Главная Справочник Энциклопедия радиоинженера
“Справочник” – информация по различным электронным компонентам: транзисторам, микросхемам, трансформаторам, конденсаторам, светодиодам и т.д. Информация содержит все, необходимые для подбора компонентов и проведения инженерных расчетов, параметры, а также цоколевку корпусов, типовые схемы включения и рекомендации по использованию радиоэлементов.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным “конструктором для взрослых”, Arduino, на базе которого можно создать всё что угодно. Однако, связка “Ардуино – шаговый двигатель” требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя. Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1. Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2. Пассивный – контроллер будет понимать только логику “включить/выключить двигатель”. Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
Подключение
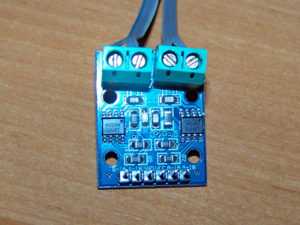
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
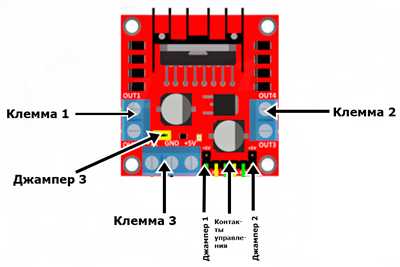
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт – +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика “пассивного” управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
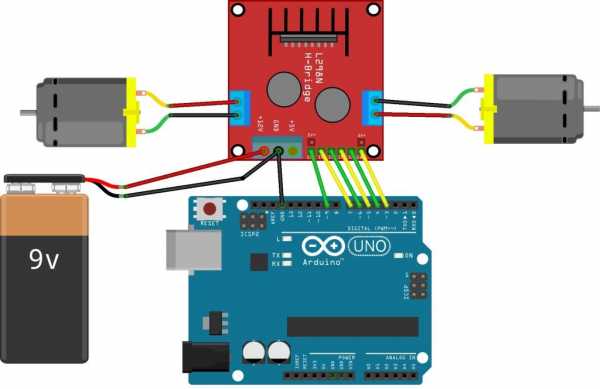
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
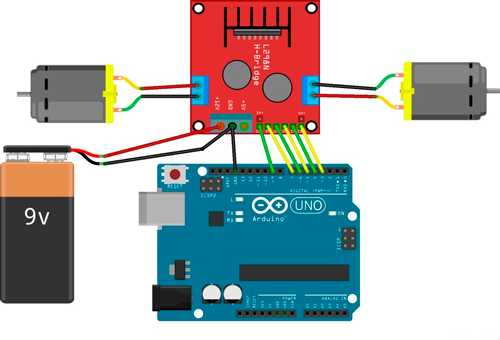
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ “~”). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
1 | 1 | 0 | Вращается по часовой стрелке |
1 | 0 | 1 | Вращается против часовой |
0 | 1 | 0 | Не вращается |
0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENA Логический уровень на контакте IN1 Логический уровень на контакте IN2 Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя. А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
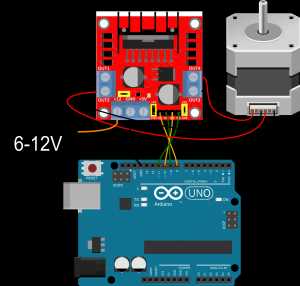
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
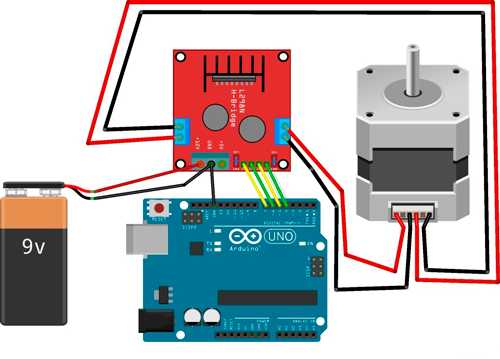
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так – File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
Дата публикации: 30.05.2018
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Ардуино L298N драйвер шаговых двигателей
Существует множество ситуаций, где применение драйвера шаговых двигателей Ардуино L298N обеспечит идеальное решение. Например, этот «шилд» может равномерно вращать видеокамеру для съёмки, либо открывать или закрывать двери гаража в Вашем особняке.
Ардуино L298N драйвер шаговых двигателей
Используется для:
1. Управление двумя двигателями постоянного тока;
2. Управление шаговым двух фазным двигателем;
3. Используется как платформа драйвера постоянного тока.
Широко применяется в роботостроительстве на Ардуино.
Позволяет с помощью любого микроконтроллера управлять как униполярными так и биполярными шаговыми двигателями.
(биполярная схема является более эффективной, поэтому, если позволяет напряжение питания и разводка обмоток двигателя, желательно использовать биполярную схему включения)
Микросхема L298N представляет из себя двойной Н мост, общий ток через 2 моста — 4 А.
Содержит встроенный стабилизатор на 5 В, защитные диоды, конденсаторы, разъемы и индикатор.
Оригинальный DataSheet
Характеристики:
- Напряжение питания двигателя: +3…+35 В.
- Питание логики: 5 В.
- Входные логические уровни управления:
- лог.0: -0.3…1.5В;
- лог.1: 2.3…5В;
- Ток управления: 36 мА.
- Максимальный постоянный ток через один мост: 2 А.
- Максимальная рассеиваемая мощность: 20 Вт.
- Размер: 43×43×27мм.
Распиновка Ардуино L298N драйвера шаговых двигателей
Плата имеет следующие пины подключения:
Vcc — подключение внешнего питания двигателей.
+5 — питание логики.
GND — общий.
IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями.
OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя.
OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя.
Перемычки ENA и ENB используются для разрешения включения двигателей.
Выключатель S1 служит для переключения питания логической части микросхемы.
Схема модуля L298N Arduino имеет следующий вид:
Подключение к Ардуино L298N драйвера шаговых двигателей
Подключение двух двигателей постоянного тока к Ардуино L298N
Пример программной реализации управления модулем L298N
Данная программа управляет двумя двигателями постоянного тока. Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino.
Данная программа управляет одним шаговым двигателем в режимах «шаг» или «полушаг».
Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino.
Что бы прочитать данные из порта, выберите используемый COM порт, скорость и нажмите Connect.
Купить Arduino в Украине — arduinomania.in.ua
arduinolife.in.ua
