
принцип работы и устройство прибора для измерения расстояния
 Ультразвуковой датчик измеряет расстояние до целевых объектов по воздуху, используя бесконтактную технологию. Он отличается простотой в работе, надёжностью и экономичностью. Принцип работы этого прибора основан на технике, применяемой различными животными. Гаджет обеспечивает точные измерения во многих сложных средах и необычных материалах.
Ультразвуковой датчик измеряет расстояние до целевых объектов по воздуху, используя бесконтактную технологию. Он отличается простотой в работе, надёжностью и экономичностью. Принцип работы этого прибора основан на технике, применяемой различными животными. Гаджет обеспечивает точные измерения во многих сложных средах и необычных материалах.
Особенности работы и история изобретения
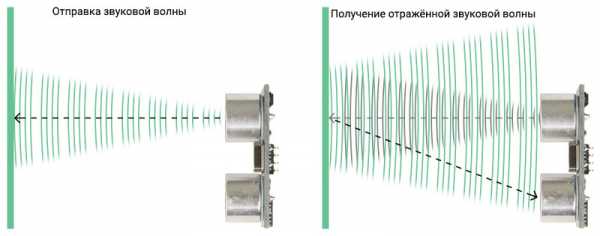
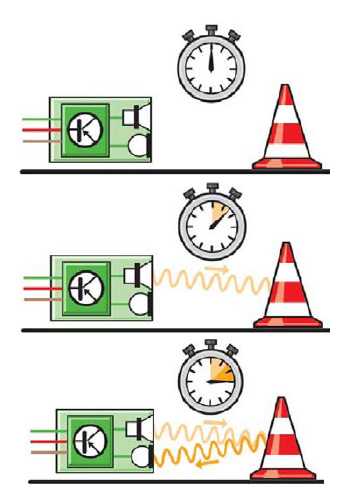
Ультразвуковой датчик излучает короткие высокочастотные звуковые импульсы через равные промежутки времени. Они распространяются в воздухе со скоростью звука. Если импульсы сталкиваются с объектом, то отражаются обратно на датчик в виде сигналов эха. Прибор самостоятельно вычисляет расстояние до цели на основе временного интервала между испусканием сигнала и получением эха.
Поскольку расстояние до объекта определяется измерением времени полёта, а не интенсивностью звука,
История изобретения ультразвукового датчика относится к 1790 году, когда Ладзаро Спалланцани впервые обнаружил, что летучие мыши маневрируют в полете, используя слух, а не зрение. Спалланцани провёл над летучими мышами ряд экспериментов, после чего пришёл к выводу, что они используют звук и уши для навигации в полной темноте. Он был пионером первоначального изучения эхолокации, хотя его исследование ограничивалось только наблюдением.
Позже учёные перешли к исследованиям сенсорных механизмов. В 1930-х годах исследователь Дональд Гриффин первым подтвердил, что летучие мыши перемещаются, используя звук для навигации, и открыл тайну их замечательной способности перемещаться в темноте. Как удалось выяснить, животные испускали ультразвуковые звуки и слышали отражённые звуковые волны, чтобы точно определить объекты в их траектории полёта. Гриффин назвал сенсорно-акустическую форму летучих мышей навигационной эхолокацией.
Эхолокация — это использование звуковых волн и эхосигналов для определения того, где и на каком расстоянии находятся объекты.
Способность обнаруживать и излучать ультразвуковые частоты, находящиеся выше человеческого диапазона слуха, является важным инструментом выживания не только у летучих мышей. Ночные и морские животные полагаются на чувствительные системы для навигации и поиска добычи, в то время как некоторые насекомые используют ультразвуковой слух для обнаружения хищников. Эта способность важна для многих животных.
Ультразвуковой принцип
Ультразвуковой сенсорный модуль состоит из передатчика и приёмника. Любой звук выше 20 килогерц (20 000 герц) считается ультразвуком. По этой причине все звуки выше диапазона человеческого слуха называются ультразвуковыми. Передатчик испускает ультразвуковые излучения 40 кГц, а приёмник предназначен только для приёма звуковых волн 40 кГц. Датчик приёмника, находящийся рядом с передатчиком, может улавливать отражённые звуковые волны, когда модуль сталкивается с любым препятствием впереди.
Всякий раз, когда перед ультразвуковым модулем возникают препятствия, он рассчитывает время, затрачиваемое на отправку сигналов и их приём, поскольку время и расстояние связаны со звуковыми волнами, проходящими через воздушную среду со скоростью 343,2 м/сек. После приёма сигнала на дисплее отображаются данные. Таким образом можно измерить широкий диапазон материалов, включая:
- твёрдые или мягкие;
- цветные или прозрачные;
- плоские или изогнутые.
Устройство и технические характеристики
Эти приборы могут определять высоту, ширину и диаметр объектов, используя один или несколько датчиков. Элементы могут быть выбраны или отклонены в зависимости от их размеров или профилей.
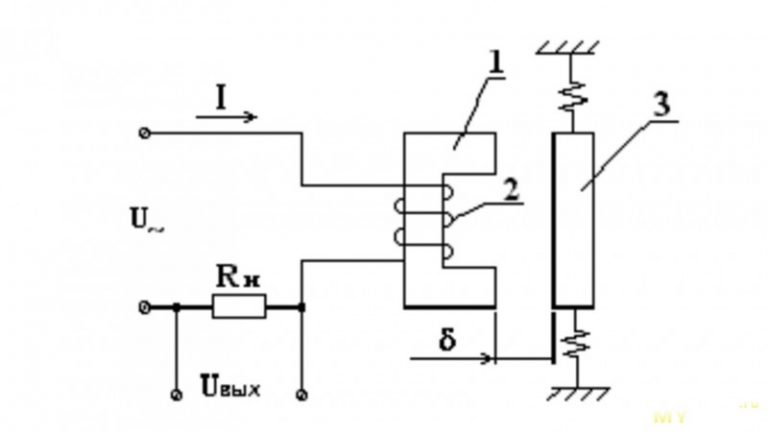
Ультразвуковой датчик расстояния определяет пространство до объекта, измеряя время, затраченное звуком для его отражения. Частота звука находится в диапазоне ультразвука, что обеспечивает более точное направление звуковой волны. Это происходит благодаря тому, что звук, находящийся на более высокой частоте, рассеивается в окружающей среде.

В приборе находится две мембраны. Одна из них производит звук, а другая принимает отражённое эхо. В роли мембран в устройстве обычно выступают динамик и микрофон. Звуковой генератор создает короткие ультразвуковые импульсы и запускает таймер. Вторая мембрана регистрирует приход звукового импульса и останавливает таймер. Из полученному времени можно рассчитать путь, который преодолел звук. Расстояние до объекта составляет половину пути, пройденного звуковой волной.
Применение и преимущества
Датчики расстояния широко применяются в повседневной жизни. Автомобили оснащены датчиками парковки. Помимо измерения расстояний они могут просто зарегистрировать присутствие объекта в диапазоне измерений, например, в опасных зонах рабочих машин. Такие приборы используются в широком спектре отраслей промышленности, например:
- в печати;
- при конвертировании;
- в робототехнике;
- во время обработки материалов;
- в транспортировке и т. д.
Датчики расстояния могут использоваться для контроля или указания положения предметов и материалов. Эти приборы настолько широко применяются, что они могут быть надёжно реализованы в приложениях для измерения зернистости материала, определения уровня воды и многого другого, так как ультразвук отражается почти от любых поверхностей. Исключение составляют только мягкие материалы, например, шерсть. Её поверхность поглощает ультразвуковую волну и не отражает звук.
Ультразвуковые измерители расстояния превосходят инфракрасные датчики, поскольку они не подвержены воздействию дыма и других факторов. Хоть эта система не полностью идеальна, она является хорошим, надёжным и экономичным решением для определения расстояния и препятствий.
Гаджеты соединяются со всеми распространёнными типами средств автоматизации и телеметрии. Приложения варьируются от простых аналоговых подключений до сложных сетей передачи данных с несколькими датчиками.
220v.guru
Ультразвуковой датчик расстояния — DRIVE2
Приветствую всех читателей моего блога!
И сегодня снова речь пойдет про учебу. На этот раз хочу поделиться результатами недавно прошедшей у меня лабораторной работы по курсу Управление в Технических Системах: “Изучение принципов работы ультразвукового датчика расстояния”. Данная запись будет сделана в виде моего отчета по лабораторной работе.
Лабораторных по этому курсу было несколько, но самая, так сказать, наглядно представляющие наши труды является именно эта.
Итак, поехали:
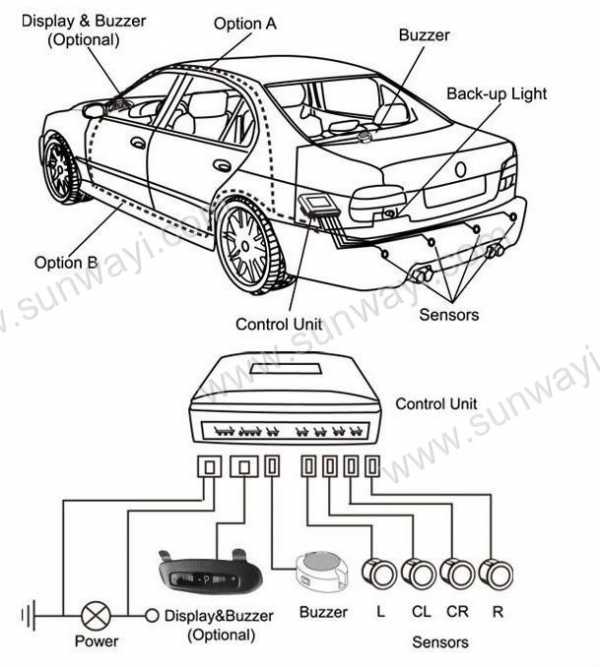
В современных автомобилях ультразвуковые датчики расстояния широко используются в парковочных радарах – Парктрониках, а также в системах автоматической парковки.
Скорость распространения звука в воздухе значительно зависит от его температуры, поэтому в системах автоматической парковки и Парктрониках используется датчик наружной температуры, по показаниям которого корректируются получаемые данные.

В данной лабораторной работе используется ультразвуковой датчик расстояний

Возможны 3 способа считывания показаний данного датчика:
1. По ширине импульса на выводе PW датчика (он и используется в данной лабораторной работе)
2. По напряжения на выводе AN датчика
3. В цифровом виде по последовательному интерфейсу
Поскольку ультразвуковые датчики нацелены на то, чтобы вести обнаружение преград в определенном направлении или области, то они имеют, так называемую, диаграмму направленности, которая показывает ширину распространения ультразвуковых волн во всем диапазоне обнаружения.
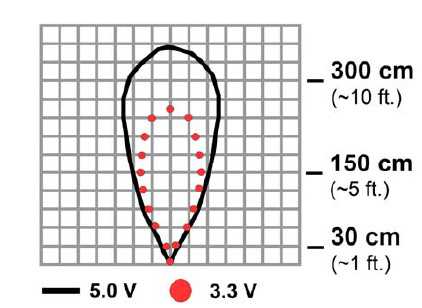
Паспортные данные диаграммы направленности составляются при отражении от тестовой мишени при температуре окружающей среды 20 С, давлении 1 атм, относительной влажности воздуха 80%. Поэтому диаграммы имеют лишь практическое значение при первоначальном выборе модели датчика и при выборе места для его установки. Для надежного функционирования систем с ультразвуковыми датчиками расстояния их диаграммы определяются экспериментально.
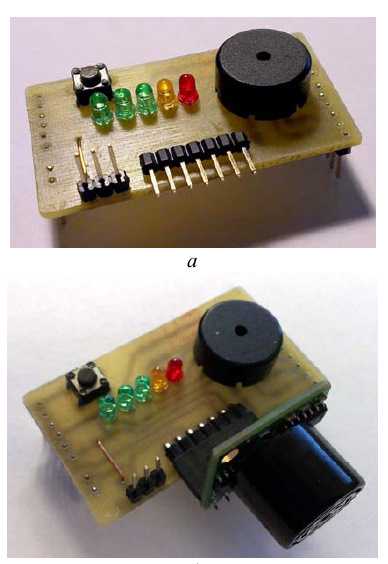
В лабораторной работе используется плата индикации, к которой подсоединяется ультразвуковой датчик. Плата индикации соединяется с микроконтроллерной платой Arduino Uno, с помощью которой происходит считывание показаний датчика и выполняются необходимые действия по индикации измеренного расстояния. Светодиоды, зумер и вывод PW датчика подсоединены к цифровым платам Arduino. Также на плате установлена кнопка сброса и имеются выводы для подключения к АЦП.
Тарировка ультразвукового датчика расстояния.
В данной работе расстояние до преграды считывается с датчика по ширине импульса на его PW выводе. Поэтому необходимо определить коэффициент пропорциональность между длительностью импульса на его выводе PW и измеренным расстоянием. Для этого напишем программу, которая будет измерять длительность импульса при известном расстоянии до объекта и выводить ее в последовательный порт.
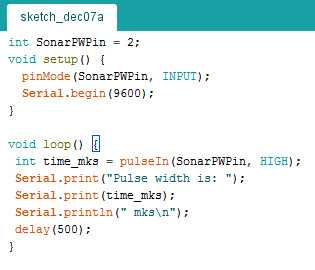
Для просмотра данных необходимо на компьютере в среде Arduino открыть монитор последовательного порта Tools — Serial Monitor.
Параллельно ведем запись с вывода PW датчика с помощью АЦП, подключив плату индикации к АЦП и, настроив параметры в программе LGraph3, записать и экспортировать данные во внешний файл.
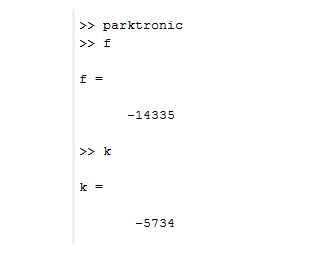
С помощью MatLab определяем длину импульса.
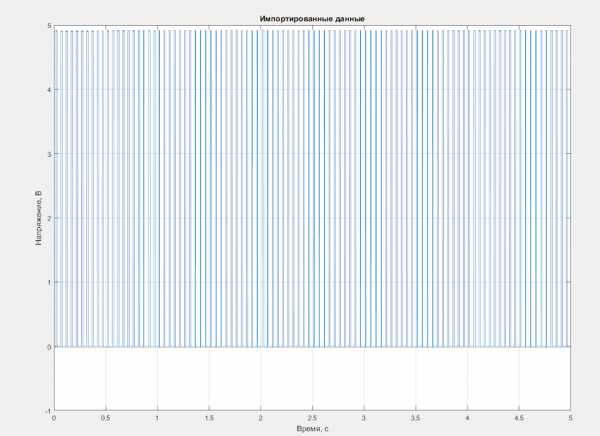
Полный размер
Графическое представление импортированных в MatLab данных
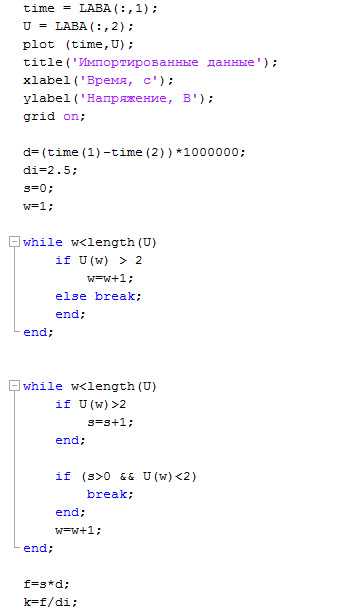
Скрипт MatLab для подсчета и вывода числа импульсов f и коэф. Пропорциональности k.
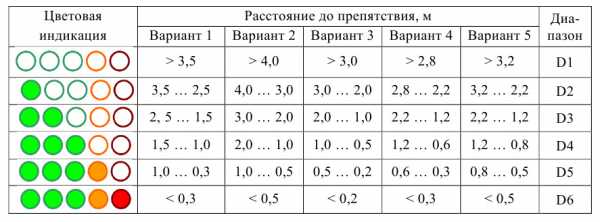
По результатам этого эксперимента строится таблица, результатом которой будет являться средняя относительная погрешность и среднее значение коэффициента пропорциональности.

(В Таблице мой вариант выделен жирным шрифтом)
Далее необходимо разработать программу для индикации расстояния. Варианты представлены на рисунке ниже (мой вариант 4).
В среде Arduino пишется программа. После написания она компилируется, загружается в Arduino и проверяется ее работа экспериментально.
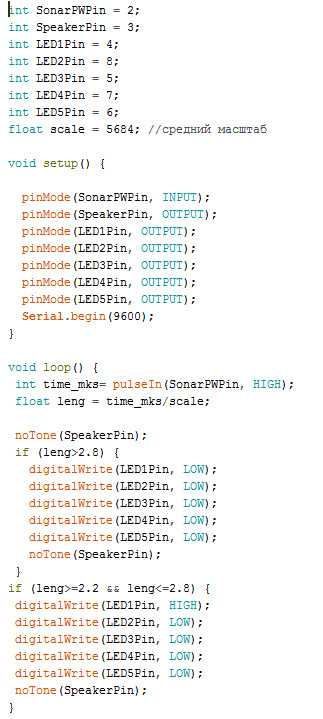
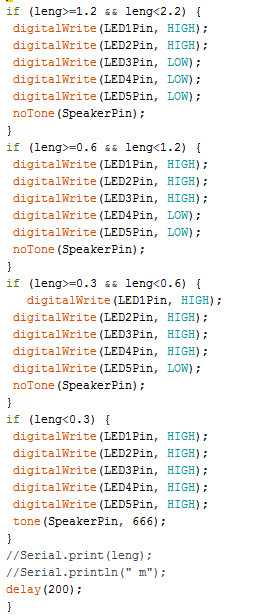
Программа заработала только со 2 раза. Это связано с указанием типа переменной leng. Так же в программе используется средний коэффициент пропорциональности.
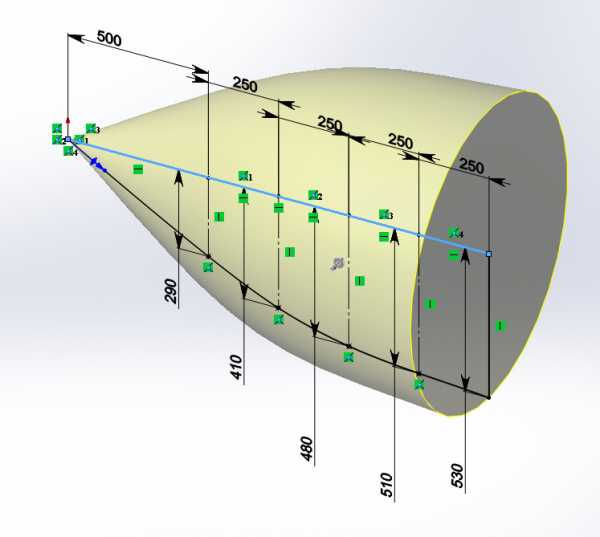
Построение участка диаграммы направленности
Определяем ширину диаграммы направленности экспериментально.
Графическое изображение диаграммы направленности выполнено в программе SolidWorks.
Выводы:
Изучены принцип работы и применение на автомобилях ультразвуковых датчиков расстояния.
Ознакомился с датчиком LV-MaxSonar-EZ1. Была произведена его тарировка, обработав данные и вычислив коэффициент пропорциональности при помощи программы MatLab, написана программа для индикации расстояния в среде Arduino и проверена работа экспериментально.
Используя запрограммированный датчик, был построен участок диаграммы направленности при помощи программы SolidWorks.
Такая вот работа. В ходе программирования зуммера (вместе с датчиком расстояния и световым индикатором) была достаточно интересная развлекуха: задавали различные звуковые частоты оповещения (чтобы совсем интересно было — на каждый светодиод свою частоту звука прописывали). Те, у кого есть какое-то музыкальное образование сразу начали примитивные мелодии делать. А вот самое неприятное получилось при проведении эксперимента с диаграммой направленности: нашелся у нас “музыкант”, которые написал разные частоты (даже сделал так, чтобы мини мелодия играла при каждом загорающемся светодиоде). В ходе замеров эта самая мелодия уж очень сильно капала на мозги.
Спасибо за внимание. Очень интересно ваше мнение.
П.С. для тех кто следит за проектированием моста для ГАЗ Садко: поправляются косяки, дело идет уже по чертежам, 3-Д модель немного совершенствуется.
www.drive2.ru
Ультразвуковой датчик расстояния: особенности, принцип работы
Ультразвуковой датчик расстояния точно так же, как и оптический, получил широкое использование в автоматизации на различных производствах. В отличие от дальномеров оптического типа, этот вид датчиков обладает меньшим диапазоном измерительных значений, а также значительно меньшую скорость измерений.
Существует несколько преимуществ: сравнительно высокая точность прибора, низкая чувствительность в загрязнению воздуха окружающей среды, к окраске поверхности объектов, а также имеет огромный диапазон температур, при которых его можно эксплуатировать.
Ультразвуковые датчики достаточно компактны, обладают качественной конструкцией, в них отсутствуют различные подвижные детали. Кроме того, оборудование практически не требует обслуживания.
Принцип работы ультразвукового датчика положения
 Ультразвуковые датчики используются для вычисления временного промежутка, который может потребоваться звуку для движения от прибора к тому или иному объекту и назад к датчику (функционирование в диффузионном режиме), либо для проверки — был ли принят отправленный сигнал определенным отдельным приемником (для оппозиционного режима работы).
Ультразвуковые датчики используются для вычисления временного промежутка, который может потребоваться звуку для движения от прибора к тому или иному объекту и назад к датчику (функционирование в диффузионном режиме), либо для проверки — был ли принят отправленный сигнал определенным отдельным приемником (для оппозиционного режима работы).
Датчик положения применяется с целью контроля наличия или местоположение разных механизмов, а также для того, чтобы осуществлять подсчет присутствующих объектов. Такой прибор может быть использован и в роли сигнализатора предельного уровня разного рода жидкости либо сыпучих веществ.
Принцип работы ультразвукового датчика положения поддерживает два режима:
- оппозиционный;
- диффузионный.
При оппозиционном режиме функционирования передатчик с приемником представляют собой отдельные устройства, которые устанавливают один напротив другого.
При этом выход выключателя будет активизирован в том случае, если ультразвуковой пучок сталкивается с препятствием (объектом).
Выделяют несколько особенностей:
- Большой диапазон, ведь ультразвуковой пучок преодолевает сигнальное расстояние всего лишь один раз;
- Достаточно быстрое переключение;
- Не очень воспринимает интерференцию, что позволяет использовать его в довольно трудных условиях;
- Сравнительно высокая стоимость монтажных работ, потому что необходимо установить два датчика — передатчик и приемник.
Перед подключением к лампочке датчик необходимо отрегулировать его и не допускать загрязнений поверхности, поскольку это может негативно влиять на работоспособность детектора.
Диффузионным режимом работы называют функционирование датчиков в том случае, когда излучатель с приемником размещены в одном корпусе.
Благодаря этому минимизируют стоимость монтажной работы, ведь нужно закрепить и настроить всего лишь одно устройство.
Однако он характеризуется большим временем срабатывания, чем период, свойственный для датчиков, которые действуют в оппозиционном режиме.Особенности датчиков расстояния и перемещения
 Принцип работы ультразвуковых датчиков расстояния и перемещение практически ничем не отличается от выше рассмотренного прибора. Небольшая разница заключается лишь в том, что на выходе присутствует аналоговый сигнал, а не дискретный.
Принцип работы ультразвуковых датчиков расстояния и перемещение практически ничем не отличается от выше рассмотренного прибора. Небольшая разница заключается лишь в том, что на выходе присутствует аналоговый сигнал, а не дискретный.
Датчики такого типа используются с целью преобразования линейных показателей расстояния до обнаруженного объекта в электрические сигналы, которые соответствуют стандарту 4-20 мА либо 0-10 Вольт. Точность измерения является не менее 0,5 мм при расстоянии меньше одного метра, а также примерно 1 мм, если расстояние составляет более одного метра.
Датчики с аналоговым выходом и настройкой верхней границы измерений требуют указания верхнего предела измерения расстояния. Это выполняется благодаря шлиц потенциометру, который выведен на корпусе прибора.
Ультразвуковые датчики расстояния и перемещения, имеющие аналоговый выход и свойство запоминания диапазона работ, предусматривает такую особенность, как фиксирование настроек нижнего и верхнего пределов измерений.
Это объясняется наличием некоторой энергозависимой памяти и применением метода программирования оборудования. Для того, чтобы настроить диапазон функционирования, перед датчиком необходимо поместить объект возле первой границы измерения, затем следует нажать кнопку для запоминания и переместить предмет на другую границу, после чего опять нажать на эту кнопку.Как действует датчик с двумя цифровыми выходами?
 Ультразвуковой датчик с двумя цифровыми выходами, а также памятью порогов включения, имеет целый ряд особенностей. Так, для порогового регулирования необходимо, чтобы величина провиса либо уровень жидкости не должны превышать одну величину или же быть значительно меньше другой. Привод данного регулятора можно присоединять к корпусу только одного прибора. Настройка порогов срабатывания двух выходов происходит с помощью кнопки, которая находится на панели датчика.
Ультразвуковой датчик с двумя цифровыми выходами, а также памятью порогов включения, имеет целый ряд особенностей. Так, для порогового регулирования необходимо, чтобы величина провиса либо уровень жидкости не должны превышать одну величину или же быть значительно меньше другой. Привод данного регулятора можно присоединять к корпусу только одного прибора. Настройка порогов срабатывания двух выходов происходит с помощью кнопки, которая находится на панели датчика.
Возможность устанавливать два датчика близко друг к другу объясняется организацией их попеременного действия, что позволяет такая особенность, как вход синхронизации. Благодаря этому можно создавать регулятор с четырьмя порогами, проводящий независимые измерения по обеих парах порогов срабатывания.
Использование схемы ультразвукового датчика направлено на систему регулирования жидкостей, присутствующих в резервуарах, по двум уровням.
Первый датчик осуществляет измерения регулировочных уровней, а второй – на аварийных уровнях. Благодаря синхронизации действий приборы функционируют, не препятствуя друг другу.Видео с простым примером работы ультразвукового датчика расстояния
elektrik24.net
Ультразвуковые датчики | Академия робототехники
Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.
Эйдзи Накано — Введение в робототехнику. Глава V. Сенсорные устройства роботов. Ультразвуковые датчики
Пьезоэлектрический эффект
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ

Технические спецификации и особенности продукта:
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)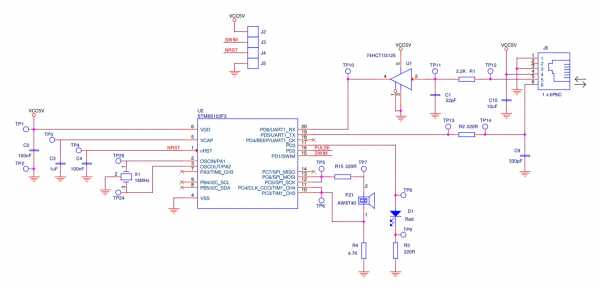
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3


Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.

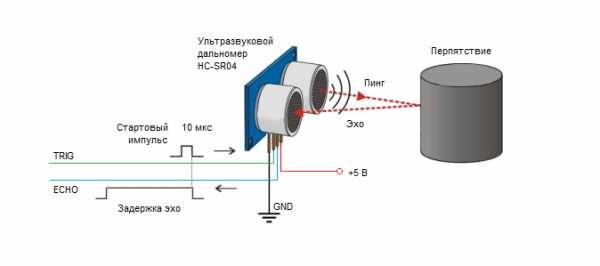
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)
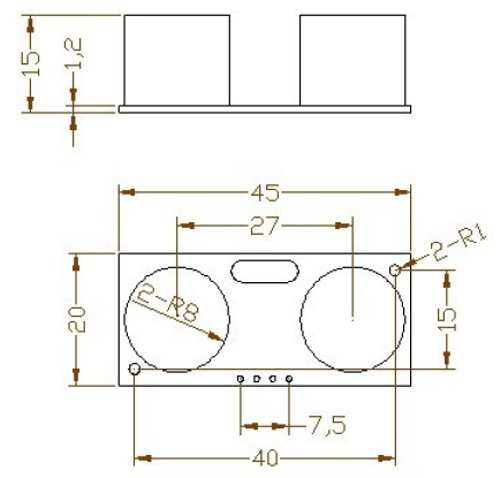
Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:
! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля. - ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.

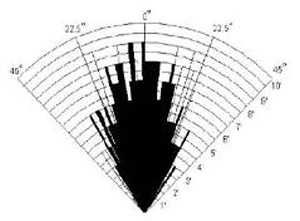
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта www.iteadstudio.com
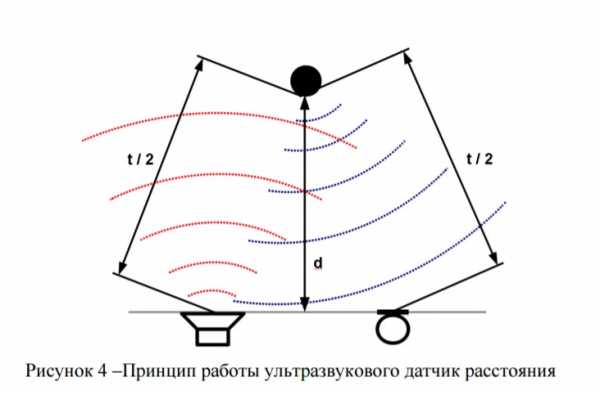
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
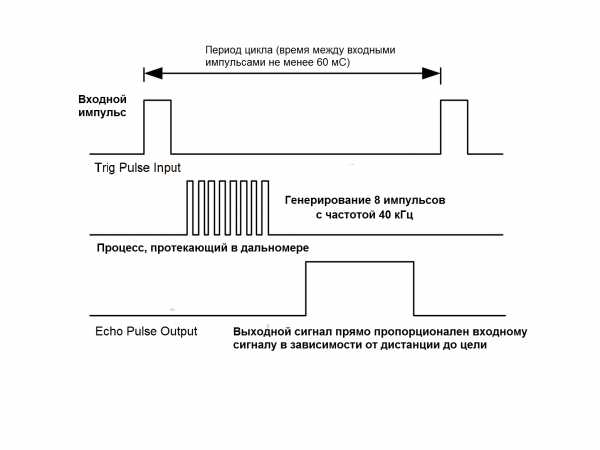
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. - Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.

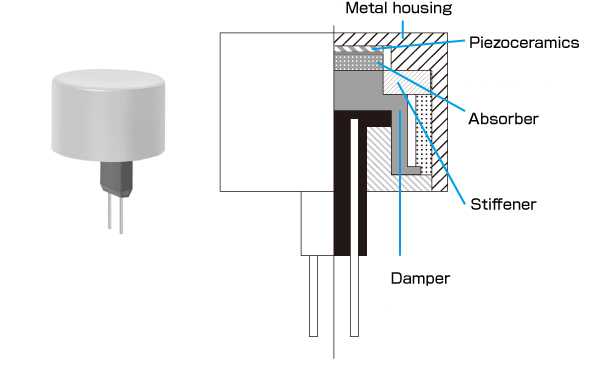
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
- Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
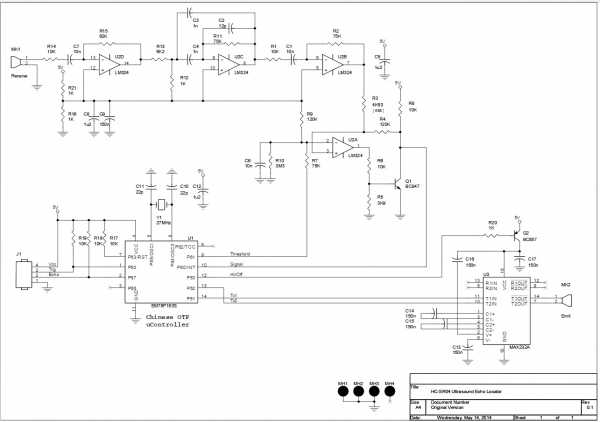
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04



Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
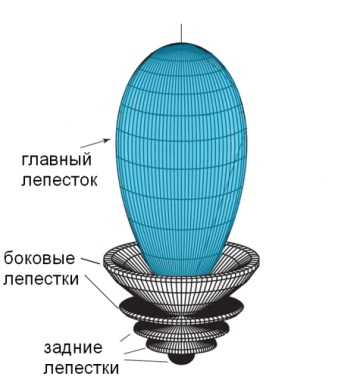
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)
2. Номинальная частота (Кгц): 40 КГц
3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB
4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB
5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata


Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
(Tc): piezoceramics Ультразвуковой датчик
(T): Категория t-общность
(40): Центральная частота (кгц)
(16): наружный диаметр? (мм)
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта
1). Номинальная частота (кГц): 40 кГц
2). излучать звук pressureat10V (= 0.02Mpa):? 117dB
3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB
4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%
5). Диапазон обнаружения (м): 0.2 ~ 20
6).-6дБ угол направления: 80o
7). Обшивка материал: алюминий
8). Обшивка ЦВЕТ: серебристый
УСТРОЙСТВО
Пьезоэлемент
RCW-0012
Ультразвуковой датчик
Ultrasonic Ranging Module HC — SR04
РАЗРАБОТКА РОБОТА НА ОСНОВЕ УЛЬТРАЗВУКОВОГО ДАЛЬНОМЕРА
Прототип мобильного робота на Arduino mega
Проекты Altera Quartus II для платы Марсоход
Ультразвуковой дальномер HC-SR04. Подключаем к Arduino.
Урок 19. Работа с ультразвуковым датчиком расстояния HC-SR04 в BASCOM-AVR
Radar проекта
Ультразвуковой дальномер HC-SR04 подключение к Arduino
HC-SR04 Дальномер ультразвуковой
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.alibaba.com/product-detail/HC-SR04-Ultrasonic-Module-Distance-Measuring_1898465949.html
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://arduino-kit.ru/userfiles/image/HC-SR04%20_.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
The Application of PWM Capture (Data Acquisition) and Ultrasonic Sensors
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
Сонар для инвалидов по зрению
https://hackaday.io/project/5903/logs
https://h
ackaday.io/project/5903-sonar-for-the-visually-impaired/log/18329-ultrasonic-module-virtual-teardown
https://www.maxbotix.com/performance.htm
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
https://ezoneda.company.weiku.com/item/SRF05-five-Pin-Ultrasonic-ranging-module-Ultrasonic-sensor-15404413.html
Использование ультразвукового дальномера
Пьезоэлектродвигатели
Пьезоэлектрический преобразователь как альтернативный источник энергии
Пьезоэлектрические преобразователи в ультразвуковой диагностике
Импульсные ультразвуковые сонары открытого типа
Пьезо-сенсор стука на Arduino UNO
Справочник ультразвуковых излучателей и приемников
Audiowell Electronics (Guangdong) Co, Ltd.
Pro-Wave Electronics Corporation (Тайвань)
Ultrasonic Sonar Ranging IC — PW0268
Miniature Tuning Fork Quartz Crystals
Air Ultrasonic Ceramic Transducers 320SR093
Sonar Ranging Module SRM400
400EP250 Pulse Transit Enclose Type Ultrasonic Transduce
Сеть магазинов «Кварц»
https://www.stroykat.by/tipyi-datchikov-rashoda-zhidkostey.html
mirrobo.ru
Лазерный датчик расстояния для всех поверхностей PowerUnit
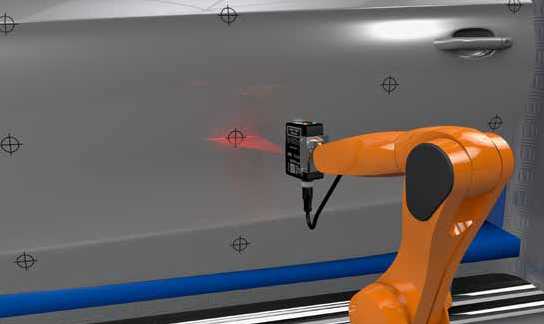
Лазерный датчик расстояния для всех поверхностей. Сильные и слабые стороны узконаправленного, линейного и многоточечного измерения расстояния.
Исторически, лазерное дистанционное зондирование было возможно только для измерения расстояния в одной определенной точке. Эта технология имеет свои недостатки. Использование других методов измерения позволяет повысить точность и скорость лазерного датчика расстояния.
Лазерное измерение расстояния линией по сравнению с традиционным узконаправленным измерением
Лазерные датчики расстояния выполняют различные измерения, включая обнаружение, подсчет, измерение расстояния и длины, контроль движущихся и неподвижных объектов. Современные датчики расстояния существенно развились и имеют высокую надежность восприятия, которая раньше была невозможна. В прошлом, точечное измерение расстояния лазером было приемлемым и единственным решением, несмотря на то, что они были менее надежными. В некоторых задачах требуется измерение узконаправленным лучом для обеспечения высокой разрешающей способности, в то время как в других задачах необходимо измерение большим диаметром луча для усреднения значений шероховатых поверхностей, или для предотвращения повреждения глаз.
Точность лазерного датчика расстояния в значительной степени зависит от условий окружающей среды. Если окружающая среда пыльная или объект измерения имеет резкие движения, то точность измерения значительно ухудшается. На точность датчика влияют также температура и окружающий свет — данная проблема часто встречается лазерных датчиках уровня, т.е. при необходимости точного измерения уровня жидкости. Неточные измерения иногда могут возникать и из-за цвета поверхности измеряемого объекта. Объекты с поверхностью белого и черного цвета наиболее сложные для узконаправленного лазерного измерения.
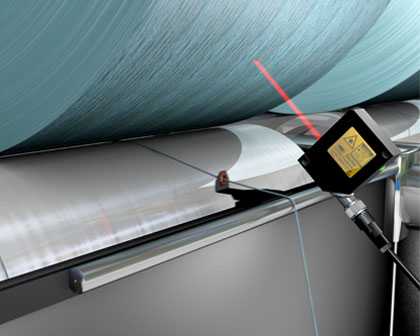
Преимущества лазерного измерения расстояния линией
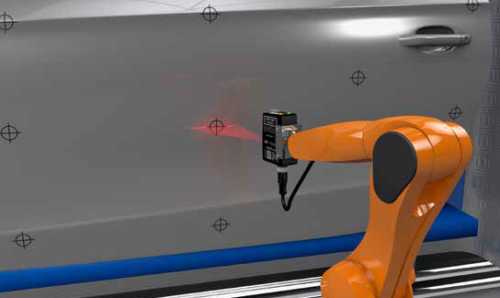 Использование измерения расстояния лазерными линиями обеспечивает много преимуществ, в том числе:
Использование измерения расстояния лазерными линиями обеспечивает много преимуществ, в том числе:
- Очень высокая скорость измерения
- Большая площадь измерения
- Высокопроизводительный блок обработки сигналов
- Триггер и синхронизация датчиков
Лазерные линейные сенсоры триангуляции могут быть использованы для построения двумерных профилей, а когда объект находится в движении, датчик строит трехмерное изображение объекта. Система проецирует лазерную линию на измеряемый объект / поверхность цели. Измерение расстояний лазерными линиями являются точными и надежными, независимо от поверхности. Устаревшие системы уступают место более надежным лазерным решения для работы в сложных средах.
Широкие функциональные возможности и дополнительные опции позволяют применять лазерный датчик расстояния для широкого круга задач, но большой модельный ряд и обилие производителей вводит пользователей в затруднение. Более того, кроме технических характеристик, важным параметром часто выступает цена и наличие датчика расстояния в России или регионе пользователя.
Для получения консультации или помощи в выборе лазерного датчика расстояния обратитесь к нашим менеджерам по телефону (812) 408-19-18 или e-mail [email protected]
| № | Производитель | Модель | Максимальное расстояние Измерения | Разрешение | Выходной сигнал | Время измерения |
| 1 | Balluff | BOD 6K | 0,08 м | — | 1 мс | |
| 2 | Balluff | BOD 18KF | 0,1 м | 1 мм | 1мс | |
| 3 | Baumer | OADM 12 | 0,12 м | 0,002…0,012 мм | Аналоговый | 0,9 мс |
| 4 | Leuze | ODS 25 | 0,2 м | 1 мм | 5…10 мс | |
| 5 | Sick | DT2 | 0,3 м | 4…20 мА | ||
| 6 | Balluff | BOD 26K | 0,3 м | 0.08…0.2 мм | 1 мс | |
| 7 | Sick | OD | 0,4 м | 4…20 мА /PNP/NPN | ||
| 8 | Sick | DT10 | 0,5 м | 4…20 мА NPN, PNP | ||
| 9 | Leuze | ODSL 8 | 0,5 м | 0.01…0.1 мм | 2…10 мс | |
| 10 | Baumer | OADM 13 | 0,55 м | 0,005…1,15мм | Аналоговый | 0,9…2 мс |
| 11 | Sick | DT20 HI | 0,6 м | 4…20 мА NPN, PNP | ||
| 12 | Balluff | BOD 66M | 0,6 м | 0.5 мм | 10.. 50 мс | |
| 13 | Leuze | ODS 96 | 0,6 м | 0.1 мм | 2.. 100 мс | |
| 14 | Baumer | OADR 20 | 0,6 м | 0,015 … 0,67 мм | Аналоговый | 0,9 мс |
| 15 | Sick | DT20 | 1 м | 4…20 мА | ||
| 16 | Baumer | OADM 21 | 1 м | 0,01 … 0,4 мм | Аналоговый | 0,9 мс |
| 17 | Baumer | OADM 20 | 1 м | 0,2 … 2,5 мм | Аналоговый | 0,9 мс |
| № | Производитель | Модель | Максимальное расстояние Работы | Выходной сигнал | Время измерения |
| 1 | Sick | DS30 | 2 м | NPN, PNP | |
| 2 | Sick | DT200 | 2 м | 4…20 мА | |
| 3 | Sick | WTA24 | 3 м | 4…20 мА, PNP | |
| 4 | Sick | DS40 | 5 м | NPN, PNP | |
| 5 | Omron | E3JK | 5 м | NPN, PNP | 1 мс |
| 6 | Balluff | BOD 63M | 6 м | 10 мс | |
| 7 | Omron | E3JM | 10 м | NPN, PNP | 1 мс |
| 8 | Omron | E3G | 10 м | NPN, PNP | 1 мс |
| 9 | Omron | E3F2 | 10 м | NPN, PNP | 1 мс |
| № | Производитель | Модель | Максимальный диапазон работы | Разрешение | Выходной сигнал | Время измерения |
| 1 | Omron | E3ZM | 15 м | NPN, PNP | 1 мс | |
| 2 | Omron | E3FZ/E3FR | 15 м | NPN, PNP | 1 мс | |
| 3 | Sick | DS60 | 20 м | 2 х NPN, 2 х PNP | ||
| 4 | Balluff | BOD 66M | 20 м | 5 мм | 10…50 мс | |
| 5 | Leuze | ODSL 96 | 20 м | 1 мм | 2…100 мс | |
| 6 | Sick | DL60 | 24 м | 4…20 мА, PNP, NPN | ||
| 7 | Sick | DS500 | 30 м | NPN, PNP | ||
| 8 | Sick | DT500 | 30 м | 0/4…20 мА, RS 422 Can bus | ||
| 9 | Leuze | ODSL 30 | 30 м | 0.1/1 мм | 30…100 мс | |
| 10 | Dimetix | EDS-C | 30 м | Profibus, SSI | 3 Гц | |
| 11 | Omron | E3Z | 30 м | NPN, PNP | 1 мс | |
| 12 | Leuze | ODS 96 | 50 м | 0.1…1 мм | 2…100 мс | |
| 13 | TR Electronic | LLB-65 | 65 м | 0,1мм | Аналоговый Modbus, Profibus, SSI | |
| 14 | IFM | O1D100 | 100 м | 20 мс | ||
| 15 | Astech | LDM41 | 100 м | 0,1мм | Аналоговый Modbus, Profibus, Ethernet |
| № | Производитель | Модель | Максимальный диапазон измерения | Разрешение | Выходной сигнал | Частота измерения |
| 1 | Sick | DME4000 | 130 м | SSI, Profibus, RS422, DeviceNet, Hiperface | ||
| 2 | Sick | DME2000 | 130 м | 0/4…20 мА, RS232 | ||
| 3 | Dimetix | DLS-C | 150 м | RS-232 / RS-422 Profibus, SSI | 6 Гц | |
| 4 | Sick | DMT | 155 м | 4…20 мА, Profibus, RS 232, RS 422/RS 232 | ||
| 5 | Sick | DMT10-2 | 155 м | 4…20 мА, Profibus, RS 232, RS 422/RS 232 | ||
| 6 | Leuze | AMS 200 | 200 м | 0.3..0.7 мм | 10 Гц | |
| 7 | Sick | DMD | 240 м | Profibus, Interbus, SSI | ||
| 8 | TR Electronic | LE-200 | 240 м | 0,1мм | Аналоговый Modbus, Profibus, SSI | |
| 9 | Sick | DME5000 | 300 м | SSI, Profibus, RS422, DeviceNet | ||
| 10 | Sick | DME3000 | 500 м | SSI, Profibus, RS422 | ||
| 11 | Astech | LDM51 | 500 м | 0,1мм | Аналоговый, релейный, RS232 / RS422 / RS485, Modbus, Profibus, Ethernet | |
| 12 | TR Electronic | LLB-500 | 500 м | 0,1мм | Аналоговый Modbus, Profibus, SSI | |
| 13 | Dimetix | FLS-C | 500 м | RS-232 / RS-422 Profibus, SSI | 200 Гц | |
| 14 | Sick | DML | 1100 м | 4…20 мА, Profibus, RS 232, RS422/RS232 | ||
| 15 | Astech | LDM301 | 3000 м | 1мм | Аналоговый, релейный, RS232 / RS422, Modbus, Profibus, Ethernet |
С этой страницей часто просматривают
p-unit.ru
Оптический датчик расстояния : Indstore
Оптические датчики расстояния
- Задача: Измерение длины оптическим датчиком расстояния
- Измеряемый параметр: расстояние, дистанция.
 Заводам и производственным компанию ежедневно приходится бороться за конкурентоспособность своей продукции. Для оптимизации и повышения общей эффективности производства компании совершенствуют технологические процессы.
Заводам и производственным компанию ежедневно приходится бороться за конкурентоспособность своей продукции. Для оптимизации и повышения общей эффективности производства компании совершенствуют технологические процессы.
Повышение технологичности требует от датчиков того или иного процесса все большей скорости, точности, продолжительной и безотказной работы.
Одним из самых популярных датчиков современного производственного процесса является оптический датчик расстояния. Лазерные датчики расстояния – это оптоэлектронное устройство для определения дистанции до того или иного объекта. Бесконтактное измерение расстояния имеет несчетное количество применений. Например, датчик расстояния оптический используют для определения габаритов (толщины, высоты, длины, ширины), контроля минимального или максимального расстояния, позиционирования, уровня наполнения или опорожнения резервуара и т. д.
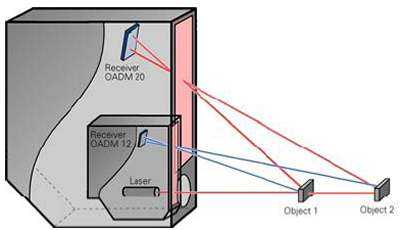 Промышленный оптический дальномер работает по одному из двух основных принципов:
Промышленный оптический дальномер работает по одному из двух основных принципов:
- Принцип измерения времени пролета луча. Т.е. лазерный диод датчика излучает импульсы, которые отражаются от цели (объекта измерения) и затем улавливаются фотоприемником того же датчика. Измерив время между моментом излучения импульса и моментом его «возврата», электроника вычисляет расстояние до объекта.
- Принцип триангуляции. Излученный свет датчиком отражается объектом и затем «возвращается» в фотоприемник датчика. Методом определения разности фаз посылаемых и принимаемых сигналов вычисляется расстояние. Данный метод также называют фазовым методом измерения.
В зависимости от принципа измерения датчики различаются по сфере применения. Так например, триангуляционный лазерный датчик позволяет производить измерения с точностью до единиц миллиметров и коротким временем измерения (всего несколько миллисекунд), в то время как принцип измерения времени пролета луча позволяет производить измерения на расстояниях превышающих несколько тысяч метров, но точность составит несколько сантиметров.
Выбирая промышленный лазерный дальномер необходимо также обратить внимание на производителя, диапазон измерения, разрешение или точность измерения, время или частота измерения, тип выходного сигнала, напряжение питания, температурный режим эксплуатации.
Современные широкоизвестные производители лазерного датчика расстояния: Baumer, IFM, Leuze, Astech, Micro-Epsilon, Balluff, Datalogic, Omron, Dimetix, TR Electronic, Sick, Sensopart, Di-soric, Pepperl-Fuchs.
Опираясь на опыт успешно реализованных проектов и многолетний опыт продаж оптоэлектронных устройств, специалисты нашей компании готовы оказать техническую поддержку и консультацию по выбору датчика бесконтактного измерения, или подобрать аналог снятой с производства модели. Для заказа и покупки датчика просим Вас связаться с нами по электронной почте [email protected] или по одному из телефонов: Санкт-Петербург (812) 309-05-12 , Москва +7 (499) 703-20-73, Екатеринбург +7 (343) 236-63-20.
Наиболее популярные модели лазерных датчиков расстояния , позволяющие решить большинство задач:
| № | Производитель | Модель | Максимальное расстояние Измерения |
Разрешение | Выходной сигнал | Время измерения |
| 1 | Balluff | BOD 6K | 0,08 м | – | 1 мс | |
| 2 | Balluff | BOD 18KF | 0,1 м | 1 мм | 1мс | |
| 3 | Baumer | OADM 12 | 0,12 м | 0,002…0,012 мм | Аналоговый | 0,9 мс |
| 4 | Leuze | ODS 25 | 0,2 м | 1 мм | 5…10 мс | |
| 5 | Sick | DT2 | 0,3 м | 4…20 мА | ||
| 6 | Balluff | BOD 26K | 0,3 м | 0.08…0.2 мм | 1 мс | |
| 7 | Sick | OD | 0,4 м | 4…20 мА /PNP/NPN |
||
| 8 | Sick | DT10 | 0,5 м | 4…20 мА NPN, PNP |
||
| 9 | Leuze | ODSL 8 | 0,5 м | 0.01…0.1 мм | 2…10 мс | |
| 10 | Baumer | OADM 13 | 0,55 м | 0,005…1,15мм | Аналоговый | 0,9…2 мс |
| 11 | Sick | DT20 HI | 0,6 м | 4…20 мА NPN, PNP |
||
| 12 | Balluff | BOD 66M | 0,6 м | 0.5 мм | 10.. 50 мс | |
| 13 | Leuze | ODS 96 | 0,6 м | 0.1 мм | 2.. 100 мс | |
| 14 | Baumer | OADR 20 | 0,6 м | 0,015 … 0,67 мм | Аналоговый | 0,9 мс |
| 15 | Sick | DT20 | 1 м | 4…20 мА | ||
| 16 | Baumer | OADM 21 | 1 м | 0,01 … 0,4 мм | Аналоговый | 0,9 мс |
| 17 | Baumer | OADM 20 | 1 м | 0,2 … 2,5 мм | Аналоговый | 0,9 мс |
| № | Производитель | Модель | Максимальное расстояние Работы |
Выходной сигнал | Время измерения |
| 1 | Sick | DS30 | 2 м | NPN, PNP | |
| 2 | Sick | DT200 | 2 м | 4…20 мА | |
| 3 | Sick | WTA24 | 3 м | 4…20 мА, PNP | |
| 4 | Sick | DS40 | 5 м | NPN, PNP | |
| 5 | Omron | E3JK | 5 м | NPN, PNP | 1 мс |
| 6 | Balluff | BOD 63M | 6 м | 10 мс | |
| 7 | Omron | E3JM | 10 м | NPN, PNP | 1 мс |
| 8 | Omron | E3G | 10 м | NPN, PNP | 1 мс |
| 9 | Omron | E3F2 | 10 м | NPN, PNP | 1 мс |
| № | Производитель | Модель | Максимальный диапазон работы | Разрешение | Выходной сигнал | Время измерения |
| 1 | Omron | E3ZM | 15 м | NPN, PNP | 1 мс | |
| 2 | Omron | E3FZ/E3FR | 15 м | NPN, PNP | 1 мс | |
| 3 | Sick | DS60 | 20 м | 2 х NPN, 2 х PNP | ||
| 4 | Balluff | BOD 66M | 20 м | 5 мм | 10…50 мс | |
| 5 | Leuze | ODSL 96 | 20 м | 1 мм | 2…100 мс | |
| 6 | Sick | DL60 | 24 м | 4…20 мА, PNP, NPN | ||
| 7 | Sick | DS500 | 30 м | NPN, PNP | ||
| 8 | Sick | DT500 | 30 м | 0/4…20 мА, RS 422 Can bus |
||
| 9 | Leuze | ODSL 30 | 30 м | 0.1/1 мм | 30…100 мс | |
| 10 | Dimetix | EDS-C | 30 м | Profibus, SSI | 3 Гц | |
| 11 | Omron | E3Z | 30 м | NPN, PNP | 1 мс | |
| 12 | Leuze | ODS 96 | 50 м | 0.1…1 мм | 2…100 мс | |
| 13 | TR Electronic | LLB-65 | 65 м | 0,1мм | Аналоговый Modbus, Profibus, SSI |
|
| 14 | IFM | O1D100 | 100 м | 20 мс | ||
| 15 | Astech | LDM41 | 100 м | 0,1мм | Аналоговый Modbus, Profibus, Ethernet |
| № | Производитель | Модель | Максимальный диапазон измерения | Разрешение | Выходной сигнал | Частота измерения |
| 1 | Sick | DME4000 | 130 м | SSI, Profibus, RS422, DeviceNet, Hiperface | ||
| 2 | Sick | DME2000 | 130 м | 0/4…20 мА, RS232 | ||
| 3 | Dimetix | DLS-C | 150 м | RS-232 / RS-422 Profibus, SSI |
6 Гц | |
| 4 | Sick | DMT | 155 м | 4…20 мА, Profibus, RS 232, RS 422/RS 232 |
||
| 5 | Sick | DMT10-2 | 155 м | 4…20 мА, Profibus, RS 232, RS 422/RS 232 |
||
| 6 | Leuze | AMS 200 | 200 м | 0.3..0.7 мм | 10 Гц | |
| 7 | Sick | DMD | 240 м | Profibus, Interbus, SSI | ||
| 8 | TR Electronic | LE-200 | 240 м | 0,1мм | Аналоговый Modbus, Profibus, SSI |
|
| 9 | Sick | DME5000 | 300 м | SSI, Profibus, RS422, DeviceNet | ||
| 10 | Sick | DME3000 | 500 м | SSI, Profibus, RS422 | ||
| 11 | Astech | LDM51 | 500 м | 0,1мм | Аналоговый, релейный, RS232 / RS422 / RS485, Modbus, Profibus, Ethernet |
|
| 12 | TR Electronic | LLB-500 | 500 м | 0,1мм | Аналоговый Modbus, Profibus, SSI |
|
| 13 | Dimetix | FLS-C | 500 м | RS-232 / RS-422 Profibus, SSI |
200 Гц | |
| 14 | Sick | DML | 1100 м | 4…20 мА, Profibus, RS 232, RS422/RS232 | ||
| 15 | Astech | LDM301 | 3000 м | 1мм | Аналоговый, релейный, RS232 / RS422, Modbus, Profibus, Ethernet |
www.indstore.ru
Датчик расстояния оптоэлектронный. Дальность:40-300мм; аналоговый; 22мА
Датчик расстояния оптоэлектронный SHARP GP2Y0A21YK0F Analog Distance Sensor• Минимальная зависимость от цвета отражающих объектов
• Расстояние обнаружения: 40-300 мм
Бесконтактный датчик для измерения расстояния. Его принцип работы состоит в анализе отраженного инфракрасного излучения светодиода датчика от окружающих предметов. Предназначен для установки в механических приборах для определения расстояния до подвижных деталей конструкции. Оптоэлектронный датчик расстояния Sharp GP2Y0A21YK0F удобно использовать в робототехнических проектах на основе Arduino. Подвижные моторизованные платформы, оснащенные такими датчиками, приобретают примитивный аналог зрения. При упрощенной электрической схеме обработки сигнала это отличный способ предотвратить столкновение с препятствием.
Характеристики
Напряжение питания
Номинальное 4,5…5,5 В
Предельное -0,3…+7 В
Ток потребления – 30 мА
Измеряемое расстояние 0,1–0,8 м
Выходной сигнал – аналоговый
Размеры 29,5 Х 13Х 13,5 мм
Температура окружающего воздуха
во время работы -10…60 ℃
хранения -40…70 ℃
Электроника и конструкция датчика
В пластмассовом корпусе датчика находятся ИК светодиод и приемник, представляющий собой матрицу светочувствительных элементов, закрытых линзой. Корпус имеет два отверстия для винтового крепления. Оптика светодиода создает узкий луч. Электроника датчика Sharp GP2Y0A21YK0F преобразует сигналы матрицы ИК-приемника в один аналоговый сигнал. На корпусе датчика расположена вилка соединителя Japan Solderless Terminal (JST) тип S3B-PH, имеющая 3 контакта.
Подключение
Для подключения датчика расстояния используют жгут из трех проводов. Подключение можно сделать через фирменный жгут 3-Pin Female JST PH-Style Cable имеющий розетку JST. В этом случае цветовая маркировка проводов будет соответствовать сигналам: красный – питание, черный – общий, белый – выходной сигнал.
Если расположить датчик Sharp GP2Y0A21YK0F так, чтобы взгляд падал на соединитель и фотоэлементами от себя, то назначение контактов будет таким.
Датчик фиксирует отражение от объекта луча светодиода на удалении не более 0,8 м. Объекты находящиеся дальше датчик расстояния Sharp GP2Y0A21YK0F “не видит”. “Угол зрения” можно представить в виде конуса с диаметром в средней части около 0,16 м. Излучение отражается под углом и возвращается на воспринимающий элемент датчика. Чем дальше объект, тем острее угол. Принцип работы заключается в облучении разных участков матрицы при различных углах отражения. В зависимости от облучаемых участков выходной аналоговый сигнал принимает ту или иную величину.
Нелинейность выходного сигнала
При отсутствии препятствия минимальное напряжение выходного сигнала около 0,5 В. Чем ближе находится препятствие, тем выше напряжение на выходе. При приближении датчика к препятствию на расстояние от 0,8 до 0,4 м напряжение выхода возрастает почти линейно до величины 1,5 В. Дальнейшее сближение вызывает увеличение скорости нарастания напряжения выхода и на расстоянии от 10 см до 4 см возрастает уже от 2,3 до 3,2 В. Здесь сближение на 6 см увеличило выход на 0,9 В. При дальнейшем сближении закономерность нарушается и происходит снижение напряжения выхода.
Обработка данных требует представления их в виде расстояния, а не напряжения выхода. Для точного измерения расстояния обработка должна учитывать закономерность связывающую расстояние и выходной уровень. Программно нелинейность выходного сигнала корректируется с помощью таблицы или путем преобразования значения напряжения в расстояние по формуле. У разных экземпляров Sharp GP2Y0A21YK0F кривая отличается незначительно.
Установка
Если дистанция до объекта меньше 0,1 м данные датчика нельзя обработать, рядом расположенное препятствие покажется далеким. Одному значению выходного напряжения соответствуют два расстояния: очень близкое и далекое. Самый лучший способ избавиться от этого недостатка – установка датчика на расстоянии 10 см и более от переднего края, защищаемого от столкновения. При установке на движущуюся роботизированную платформу, датчик Sharp GP2Y0A21YK0F, защищающий от столкновения при движении вперед, располагается на расстоянии 10 см от переднего края робота, а датчик, для движения назад в 10 см от заднего края.
Для полноты информации датчик можно превратить в радар, сканер. Рекомендуется установка на механический привод, поворачивающий датчик на угол для сканирования окрестностей. Если одновременно с получением данных от датчика знать его угол поворота, то можно выйти на новый уровень прибора “зрения”. Более надежная защита от столкновения потребует применение двух датчиков, направленных перекрестно.
Обработка сигнала
Простейший случай использования датчика в качестве бампера без определения дистанции потребует на выходе датчика электронной схемы порогового элемента или установки компаратора. Схема должна иметь два выходных состояния: логический 0 или 1. При критическом сближении напряжение на выходе датчика возрастает выше пороговой величины и логический уровень на выходе компаратора меняется с единицы на нуль, электродвигатель отключается.
Определение расстояния требует применения микроконтроллера с АЦП “на борту” и разработки программы. Если соблюдать правила установки, изложенные выше, то опорное напряжение АЦП должно быть 2,56 В. Для точного измерения дистанции напряжение питания 5 В датчика Sharp GP2Y0A21YK0F и опорное напряжение АЦП должны поддерживаться с высокой точностью и должны быть очищенными от шумов. АЦП МК оцифровывает аналоговый сигнал, программа обработки забирает полученные данные из регистров АЦП.
Математика и программирование
После оцифровки данных необходимо линеаризовать значения, другими словами превратить кривую зависимости напряжение/расстояние в прямую. Практически для этого каждое получаемое значение необходимо преобразовать по формуле. На основании данных преобразование следует проводить по формуле:
V=1/(R+k) где:
V – результат АЦП преобразования,
R – расстояние,
k – константа. Для предыдущей модификации датчика Sharp GP2Y0A21YK0F ее значение 0,42.
Операция деления выпрямляет зависимость. Значение константы может быть применено и для других моделей датчиков. Для хорошей функции преобразования необходимо экспериментальным путем определить константу k. Заключенные в МК математика и программирование состоят в линеаризации характеристики датчика на первом этапе обработки сигнала. Для 10-битного преобразования АЦП после подбора константы для предыдущей модели датчика формула для опорного напряжения 2.56 вольт будет выглядеть так:
R=5222/(V-13)
Здесь 5222 и 13 константы, их лучше уточнить экспериментально.
В программе вычисляется расстояния по полученной формуле.
Техническая документация
arduino-kit.ru
