
Рекомендации по выбору энкодера
Энкодер — это прибор, преобразующий линейное или угловое перемещение в электрические сигналы, позволяющие определить величину этого перемещения.
В последнее время название этих приборов – «энкодеры» утвердилось, и стало общеупотребимым. Мы не беремся здесь и сейчас обсуждать преимущества или недостатки названия «Энкодеры», а также его правильность. Просто говорим, что это название утвердилось и все заинтересованные лица понимают о чем идет речь. Перечень прежних названий этих приборов был весьма разнообразен: фото-импульсные датчики, ФИДы, датчики угловых перемещений, ДУПы, преобразователи фотоэлектрические, преобразователи вращения (например, ЭНИМС-овский ВЕ178) и т д. В настоящее время даже такой значительный российский производитель датчиков перемещения, как СКБ ИС, в скобках, после названия «Преобразователь перемещения», использует слово «Энкодер». Будем и мы далее использовать данное название.
Различают инкрементные энкодеры, абсолютные энкодеры, аналоговые энкодеры и резольверы. Первые три вида бывают магнитными и оптическими, в зависимости от физического процесса, позволяющего осуществить преобразование угла или перемещения в электрический сигнал. Резольверы – датчики угловых перемещений на основе вращающихся трансформаторов. Как правило, к ним название «энкодер» не употребляют.
Инкрементные энкодеры (от англ. increment «увеличение, приращение») на своем выходе формируют последовательность импульсов, которые поступают на счетные или другие приемные устройства, и число импульсов или их фронтов подсчитывается. Сразу же после подачи питания измеряемое положение неизвестно, поскольку на выходе инкрементального энкодера имеется информация лишь о приращении положения. После включения, для привязки счета к началу системы координат механизма или станка, запускается процедура «выхода в ноль» (Homming). Система совершает пробное движение и находит некие нулевые реперные точки. В момент прохождения через эти точки задается привязка к началу координат. После этого момента подсчет импульсов с выхода энкодера позволяет точно определить положение исполнительного механизма, но только в том случае, если высокая частота импульсов или помехи позволяют это сделать. Сбой подсчета импульсов с выхода инкрементального энкодера приводит к ошибкам перемещения, к неработоспособности системы в целом, и требует, по меньшей мере, повторного «выхода в ноль».
Выходной сигнал инкрементального энкодера может представлять собой две последовательности прямоугольных импульсов в форме меандры, сдвинутых друг относительно друга на четверть периода. Последовательности обозначаются обычно латинскими буквами A и B. Знак угла сдвига между A и B определяет направление движения. Третий выход инкрементального энкодера формирует короткий импульс, называемый ноль-меткой (Z-меткой, индексом), который строго привязан к определенному месту положения ротора энкодера. Эта ноль-метка часто используется системой точного перемещения в процедуре «выхода в ноль».
В случае, если инкрементальный энкодер имеет высокую разрешающую способность (например, 17 bit или 20 bit), то нет возможности передать высокочастотный сигнал на вход приемного устройства и потом его подсчитать. В этом случае поступают следующим образом. Предварительный подсчет импульсов производят в самом энкодере, а последующим устройствам передается информация о положении с помощью фреймов (сообщений) по последовательной цифровой сети. Описанный выше способ часто используют в высокоточных сервоприводах.
И еще одно замечание, на которое хотелось бы обратить внимание при рассмотрении инкрементальных энкодеров. В специальных энкодерах, предназначенных для работы с некоторыми сервоприводами, кроме обычных последовательностей импульсов A, B и Z имеется три дополнительных выхода, на которых формируется сигналы о положении ротора вращающегося синхронного серводвигателя. Выходы обычно имеют названия U,V,W (иногда HA,HB,HC). Такой специальный энкодер невозможно заменить обычным энкодером с выходами A, B и Z. Понять, имеются ли у запрашиваемого Клиентом энкодера дополнительные выходы U,V,W можно по документации к конкретному сервоприводу, где такая информация, как правило, имеется. Или по количеству выводов, которых у спец энкодеров не меньше 15.
Абсолютные энкодеры. По выходной информации таких энкодеров можно судить о положении его ротора независимо от того отключалось ли его питание или нет. Различают однооборотный абсолютный энкодер и многооборотный.
Однооборотный абсолютный энкодер преобразует угол поворота вала энкодера в цифровой код. Причем каждому положению внутри оборота соответствует свое значение кода. Форма представления цифрового кода может быть различной: параллельный код (двоичный, двоично-десятичный, Грея и др.) и последовательный код, когда информация о положении содержится в цифровых сообщениях, формируемых на выходе энкодера (например, с помощью протоколов SSI, BiSS, CAN Open и др.)
Многооборотный абсолютный энкодер формирует информацию о положении не только внутри оборота, но и подсчитывает ещё количество полных оборотов вала энкодера. Количество полных оборотов, которое запоминает в своей памяти такой энкодер, может достигать величины в несколько сотен тысяч. Форма представления цифрового кода – последовательный и/или параллельный код.
Весьма часто, в сервоприводах многооборотный абсолютный энкодер используется совместно с внешней аккумуляторной батареей, подключенной к специальным клеммам этого энкодера. Без батарей память о положении привода после отключения питания теряется. И такой энкодер без батареи используется как инкрементальный энкодер.
Аналоговый энкодер. Выходной сигнал аналогового энкодера представляет собой две последовательности синусоидальных сигналов, сдвинутых друг относительно друга на фазный угол 90°. Амплитуда сигналов составляет 0.5В (размах колебаний Upp – 1В). Всего сигналов 4, поскольку каждая последовательность представлена прямым и инверсным сигналами (два дифференциальных выхода). В паспортных данных к энкодеру всегда указывается количество периодов синусоидальных сигналов на оборот вала или длина соответствующая периоду для линейных аналоговых энкодеров.
С помощью последующей совместной обработки двух синусоидальных выходных сигналов (с помощью метода интерполяции) можно получить высочайшую разрешающую способность, которая в тысячи раз точнее, чем период этих выходных сигналов (коэффициент мультипликации может достигать значения 4096).
Аналоговые энкодеры используются, как правило, в высокоточных прецизионных системах позиционирования.
Резольвер. Или, так называемый, вращающийся трансформатор. Резольвер имеет входную обмотку возбуждения, на которую извне подается сигнал с высокой частотой (единицы или десятки килогерц). На двух выходных обмотках формируются сигналы с амплитудой и фазой, которые зависят от положения ротора резольвера. С помощью последующей обработки двух выходных сигналов (с помощью метода интерполяции) можно получить информацию о положении ротора резольвера.
Некоторые известные европейские производители электроприводов используют резольверы, как основной датчик обратной связи сервосистем. Китайские производители отдают предпочтение (на данный момент) энкодерам на валу серводвигателей.
Отсутствие электронных элементов в самом резольвере, позволяет обеспечить повышенный температурный диапазон работы и большую механическую прочность этого датчика по сравнению с энкодерами, содержащими электронные компоненты.
www.shop.zetek.ru
Шаговые двигатели с энкодером: преимущества использования
Использование шаговых двигателей в комплекте с энкодерами позволяет создавать на простой схеме, включающей в себя непосредственно шаговый двигатель и контроллер шагового двигателя полноценный сервопривод, который, при высокой функциональности и надёжности, будет значительно более дешёвым и простым в управлении, чем сервопривод на основе бесколлекторного двигателя. Совмещающий в себе все основные преимущества ШД с простотой настроек и обслуживания, такой сервопривод отличается высокой точностью позиционирования и полностью удовлетворяет потребностям широкого круга пользователей устройств такого типа, от моделистов до операторов станочного оборудования.
Преимущества сервоприводов на базе шаговых двигателей
Поскольку шаговый двигатель изначально отличается высокой точностью позиционирования (200 или 400 шагов на оборот +-5%), что является одним из основных его конкурентных преимуществ, традиционно считается, что установка энкодера на двигатель такого типа не является необходимостью. Однако практика доказывает, что даже при использовании самого надёжного контроллера возможен пропуск шагов, который может стать следствием целого ряда причин, таких, как:
— повышенная нагрузка;
— поперечная нагрузка;
— некорректное генерирование импульсов контроллером и т.д;
По сути, при использовании схемы ШД+контроллер даже такие незначительные неполадки, как перебои в подаче питания контроллеру могут стать причиной серьёзного сбоя: система управления теряет точку отсчёта, и, в отсутствии обратной связи, возвращение шагового двигателя к изначальному положению становится невозможным.
Использование шагового двигателя с энкодером позволяет решить вышеотмеченную проблему: при пропуске шагов или перебоях питания с помощью энкодера осуществляется возврат ШД к нужной точке, что позволяет продолжить корректную работу оборудования по заданной программе. Кроме того, применение энкодера позволяет дополнительно повысить точность позиционирования шагового двигателя, поскольку разрешающая способность энкодеров может достигать 2000 импульсов на оборот. Благодаря этим преимуществам сервоприводы на основе шаговых двигателей довольно часто применяются в сложном станочном оборудовании.
Купить шаговый двигатель с энкодером в Stepmotor
В каталоге Stepmotor представлен широкий выбор шаговых двигателей и энкодеров, что позволяет подобрать наилучшим образом подходящий сервопривод на основе ШД для оборудования любого типа. Если вы решили купить ШД с энкодером в наличии по доступной цене на нашем сайте, внимательно ознакомьтесь с характеристиками интересующих вас устройств и непременно убедитесь в том, что подобранные вами устройства совместимы. При возникновении вопросов по подбору оборудования, вы всегда можете проконсультироваться у технического специалиста по телефонам 8 800 5555 068 — по России (звонок бесплатный), в Москве +7 (495) 308-38-48, в СПб +7 (812) 953-07-32) или воспользовавшись формой обратной связи.
stepmotor.ru
Что такое энкодер и его сферы использования?
Благодаря инженерному интересу к робототехнике и ее возможностям, стремительному развитию автомобилестроения и оптимизации работы электро-вычислительных машин, в технике появилось новое устройство под названием энкодер.
Что такое энкодер? Если быть более точным, то энкодер – прибор, который конвертирует угловое или линейное перемещение в последовательность сигналов.
Известен еще как датчик угла поворота – преобразует угол поворота объекта, который вращается (вал) в электрические сигналы, позволяющие определить тот же угол поворота (вала), направление его вращения и положение относительно оси.
Потребность в данном датчике возникла при поиске новых, более совершенных методов создания и работы всем известных сервомоторов. Первым был импульсный магнитный энкодер, который определял положение ротора в системе бесщеточного двигателя постоянного тока (двигатель с электронной коммутацией). Энкодер во время вращения производил импульсы по числу полюсов магнита.
На данный момент по типу действия, мы имеем как минимум три вида энкодеров:
- Магнитные;
- Магниторезисторные;
- Оптические.
Наряду с энкодерами, нередко используются и датчики температуры, поскольку там, где есть механическое или любое другое движение возникает трение и рост температуры, значения которой не должны превышать допустимых норм.
Сферы применения энкодеров
Энкодер используется в:
- печатной промышленности – вращение валов, по которым проходит печатная бумага и краска;
- металлообработке – вращение валов с металлическими лентами и т.д;
- робототехнике – движение разных частей тела робота;
- автомобильной технике – определение положения колес при повороте;
- городском хозяйстве – лифтовой технике;
- пищевая, химическая промышленность – автоматы для фасовки, упаковки и разлива;
- электро-вычислительная техника – компьютерные мыши;
- электротехника – сервомоторы и прочих устройствах, требующих точных измерений показателей движения элементов и объектов.
Учитывая то, что как минимум в пяти из девяти пунктов используются установки, принцип работы которых основан на давлении воздуха/масла/краски, то не лишними будут и датчики давления. Они позволят вовремя определить уровень износа постоянно работающих механизмов и заменить их без вреда для производства.
Выбирая электронное, электронно-механическое и механическое оборудование в интернет-магазине «Энергопуск», вы обеспечиваете свое производство или дом только качественными устройствами, которые будут достойно служить вам.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
epusk.ru
Энкодер – это… Инкрементальный энкодер
Слово «энкодер» имеет англоязычное происхождение. Оно возникло от слова encode, что значит «преобразовывать». Наиболее известными мировыми производителями данных приборов являются такие известные бренды как Siemens, СКБ ИС, HEIDENHAIN RLS, Baumer, SICK AG, Balluff, Schneider electric (Autonics Telemecanique), OMRON.

Сфера и цель применения
Энкодер – это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. При помощи него определяется, например, положение вала электрического двигателя. В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, – это измерение угла поворота объекта во время вращения. Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в работотехнических комплексах. Используют их также во многих современных измерительных приборах, которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов.

Ранжирование энкодеров
Все ныне известные энкодеры подразделяются на абсолютные и инкрементальные, резисторные, магнитные и оптические, работающие через промышленные сети либо шинный интерфейс.
В зависимости от общего принципа работы выделяют абсолютные энкодеры и инкрементальные. Различие между этими двумя видами заключается в выполняемых ними задачах. Перечень задач абсолютного энкодера гораздо шире перечня, который охватывается энкодером инкрементальным.
Инкрементальные энкодеры
Это импульсный датчик. В процессе поворота объекта на его выходах фиксируются импульсы, количество которых прямо пропорционально углу вращения предмета. Обычно инкрементальные преобразователи применяют в процессе станкостроения с целью регистрации углового перемещения вала или в автоматизированных системах в цепи обратной связи для измерения и регистрации скорости поворота вала.
Инкрементальный энкодер – это устройство, функционирующее на основе данных импульсов, образующихся при вращении. Количество импульсов на единицу оборота – это и есть основной рабочий параметр данного устройства. Текущее значение определяется датчиком по методу подсчета количества импульсов от точки отсчета. С целью привязки систем отсчета на импульсном энкодере устанавливаются референтные метки, которые являются стартовыми после включения оборудования. Определение данных при помощи инкрементального преобразователя возможно лишь во время вращения или поворота. При остановке вращения все данные энкодера обнуляются. В итоге при последующем включении предыдущие данные счетчика будут неизвестны. Для удобства его эксплуатации следует привести вал в исходное положение. Инкрементальный энкодер идеально справляется с задачей измерения скорости поворота. При помощи подсчета количества импульсов от референтной метки можно с точностью определить также текущую координату угла вращения объекта.
Абсолютные энкодеры
Так называют абсолютный датчик положения. Обычно в подобных энкодерах наблюдаются более сложные процессы электронной обработки сигналов и имеется оптическая схема. Но зато они выдают реквизиты объекта сразу после включения, что зачастую является обязательным для корректного функционирования системы в целом. По сравнению с инкрементальными использование абсолютных энкодеров позволяет решать значительно более широкий круг задач, так как измерения производятся не при помощи фиксации импульсов, а специальными цифровыми кодами. Единица измерения подобного аппарата – это число уникальных цифровых кодов за единицу вращения (1 оборот).
 В связи с тем, что все цифровые коды, выдаваемые датчиком, уникальны, определить текущую координату линейного перемещения сразу же после включения прибора не составляет труда и без использования реферетной метки. В момент включения на выходах датчика появляется код из цифр. Он и является обозначением текущего положения угла поворота объекта. Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.
В связи с тем, что все цифровые коды, выдаваемые датчиком, уникальны, определить текущую координату линейного перемещения сразу же после включения прибора не составляет труда и без использования реферетной метки. В момент включения на выходах датчика появляется код из цифр. Он и является обозначением текущего положения угла поворота объекта. Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.Разновидности абсолютных энкодеров
В зависимости от особенностей характеристик аюсолютные энкодеры могут различаться типом крепления, наличием несквозного или сквозного, полого или выступающего вала. Ассортимент таких устройств также очень разнообразен с точки зрения внешних характеристик: длины, диаметра корпуса и так далее. Кроме того, известно, что абсолютные датчики измерения положений во время вращения бывают многооборотными и однооборотными. Однооборотные производят определение текущей координаты в пределах 1 оборота, а многооборотные способны к распознанию еще нескольких дополнительных оборотов.
Оптический энкодер – что это?
Данный преобразователь представляет собой жестко закрепленный на валу диск, сделанный из стекла. Энкодер оптический, в отличие от вышеописанных датчиков, дополнительно оборудован оптическим растором, который в процессе поворота вала перемещается и преобразовывает вращательный момент в поток света, принимаемый впоследствии фотодатчиком.
Данный тип преобразователя фиксирует углы вращения, где каждому уникальному положению соответствует специальный неповторимый код из цифр. Он вместе с количеством оборотов и представляет собой единицу измерения датчика. Подключение энкодера и принцип его действия идентичны функционированию инкрементального устройства, описанного выше.
Типы датчиков в зависимости от принципа работы
По характеристикам работы энкодеры делятся на магнитные и фотоэлектрические.
Физический принцип работы первых базируется на применении эффекта Холла, открытого в 1879 году Э. Холлом. В данном случае разность потенциалов возникает лишь при помещении проводника постоянного тока в область магнитного поля.
По характеристикам разрешения и точности магнитный энкодер уступает фотоэлектрическому, но его реализация проще. Он является гораздо менее требовательным к пространствам и условиям функционирования.
Представитель магнитного энкодера представляет собой прибор, фиксирующий цикл прохождения магнитного полюса вращающегося магнита, расположенного поблизости от чувствительного элемента. Выражение данных передатчика также имеет вид цифрового кода.
Фотоэлектрический энкодер – это датчик, функционирующий на базе фотоэлектрического эффекта, который наблюдается в результате воздействия света на вещество. Открыт данный принцип в 1887 году Г. Герцем. В процессе работы датчика данного типа наблюдается постоянное преобразование светового луча в электрический сигнал.
 Синонимом фотоэлектрического энкодера являются оптронный, оптический и оптоэлектронный. Датчики данного типа более требовательны к характеристикам производства, эксплуатации и многому другому, нежели иные энкодеры, но это оправдано, так как потенциал их точности значительно выше, нежели у конкурентов.
Синонимом фотоэлектрического энкодера являются оптронный, оптический и оптоэлектронный. Датчики данного типа более требовательны к характеристикам производства, эксплуатации и многому другому, нежели иные энкодеры, но это оправдано, так как потенциал их точности значительно выше, нежели у конкурентов.fb.ru
Энкодеры: что это такое, технологии и виды датчиков
Что такое энкодер?
Широко распространены датчики положения, преобразующие угол поворота вала в электрический сигнал. Принципы работы их различны, но среди них есть группа датчиков, в которых для определения положения используется модуляция света, электрического или магнитного поля при помощи периодических структур (решётки, зубчатые колёса и т.п.), закреплённых на валу датчика и вращающихся вместе с ним. Такие датчики называют энкодеры. В процессе детектирования и обработки изменений модулированного сигнала, как правило, получают две импульсные последовательности, сдвинутые относительно друг друга, которые подаются на выход датчика непосредственно, либо с преобразованием в сигналы другой формы.
Различные технологии энкодеров
Различные энкодеры используют различные физические принципы для своей работы. Чаще всего можно встретить оптические, магнитные и ёмкостные энкодеры.
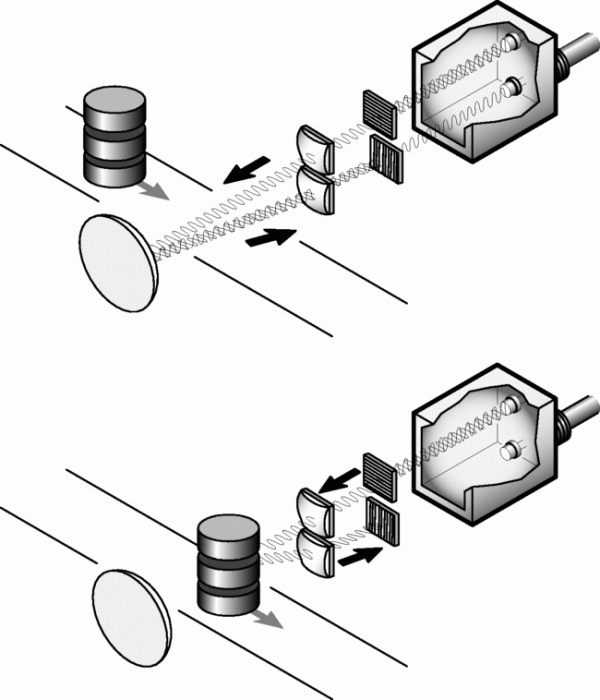
Оптические энкодеры используют модуляцию светового потока для преобразования перемещения в электрический сигнал. В зависимости от того как построена оптическая система датчика, различают отражательные (рефлективные) энкодеры и энкодеры, работающие на просвет (трансмиссионные). В рефлективных энкодерах свет от источника отражается от кодового диска прежде чем попасть на приёмник, а в трансмиссионных энкодерах свет проходит через кодовый диск. В обоих случаях периодически нанесённые метки на кодовом диске создают при вращении диска модуляцию светового потока.
Как и другие оптические системы, оптический энкодер уязвим к пыли, грязи и парам жидкостей, поскольку они снижают качество сигнала в оптической системе датчика до полного отказа. А вот к таким внешним факторам как магнитные поля он, напротив, нечувствителен.
Отдельную категорию датчиков составляют волоконно-оптические энкодеры, в которых отсутствует источник света, питающийся от электричества. Свет в них поступает снаружи по оптоволокну. По нему же выдаётся обратно сигнал положения в виде соответствующим образом изменённого светового пучка. Источник света и схемы преобразования световых сигналов в электрические располагаются в отдельном блоке электроники. Сам энкодер является устройством, не подключаемым к электрической сети. Благодаря этому волоконно-оптические энкодеры могут легко применяться во взрывоопасных зонах, а также вблизи высоковольтного оборудования.
Магнитные энкодеры в своей работе используют изменения магнитного поля. В зависимости от технологии, использованной в чувствительных элементах, в магнитных энкодерах также различают несколько разновидностей. Чаще всего выделяют магнитно-резистивные, на датчиках Холла, вихретоковые и индуктивные. В магнитно-резистивных датчиках чувствительный элемент построен с использованием магниторезистивного эффекта, который заключается в изменении сопротивления тонких плёнок специально подобранных материалов в магнитном поле. Магнитное поле создаётся постоянным магнитом, установленным на вращающейся части энкодера. Энкодеры, на датчиках Холла, используют непосредственное измерение магнитного поля при помощи датчиков, действие которых основано на эффекте Холла. Магнитное поле здесь также создаётся постоянным магнитом. Индуктивные датчики используют изменение взаимной индуктивности при взаимном перемещении нескольких обмоток, или изменение собственной индуктивности (коэффициента самоиндукции) в случае использования одной обмотки и мишени из магнитного материала. Вихретоковые датчики являются одной из разновидностей индуктивных датчиков, в которых изменение магнитного поля происходит благодаря вихревым токам, наводимым в проводящем материале мишени, расположенной на вращающейся части датчика.
Отличительными чертами магнитных датчиков являются, нечувствительность к пыли (непроводящей), грязи и парам жидкостей. При этом сильные магнитные поля могут вносить значительные помехи в работу магнитных датчиков.
Ёмкостные энкодеры используют для определения положения изменения электрического поля. Диэлектрический диск специальной формы при вращении создаёт изменение электрического поля между двумя электропроводящими пластинами, расположенными на неподвижной части датчика. Эти электропроводящие пластины образуют обкладки конденсатора и при изменении электрического поля в нём, изменяется и его ёмкость.
Для ёмкостных энкодеров наиболее критичным внешним воздействием являются сильные электрические поля.
Инкрементные и абсолютные энкодеры

Энкодеры могут отличаться не только по технологии, но и по способу представления информации о положении. В инкрементных энкодерах информация о положении выводится в виде двух последовательностей импульсов, смещённых друг относительно друга на четверть периода. Количество импульсов, появившееся на выходе датчика, говорит о пройдённом расстоянии, а направление фазового сдвига между ними – о направлении перемещения. Недостатком такого представления информации является то, что невозможно однозначно определить положение сразу же после включения питания системы. Для решения этой проблемы обычно используют перемещение системы в заранее известное положение, определяемое по дополнительному датчику. Это необходимо проделывать каждый раз после включения питания и не во всех применениях является приемлемым.
Абсолютные датчики в противоположность инкрементным, сразу после включения выдают корректную информацию о положении. При этом абсолютные датчики бывают однооборотные, которые могут однозначно определять положение только в пределах одного оборота, и многооборотные, которые могут подсчитывать также и число оборотов.
Энкодер и другие датчики
В настоящее время большинство датчиков положения, применяемых в приводах – это энкодеры того или другого типа.
Энкодер – резольвер
В отличие от энкодеров, резольвер является электрической машиной специального исполнения. С точки зрения точности резольверы сопоставимы с энкодерами, за исключением отдельных моделей энкодеров особо точного исполнения. По размерам и массе резольверы обычно больше чем энкодеры. Кроме того недостатком резольвера являются специфические требования к питанию – переменное напряжение частотой несколько килогерц, что требует соответствующей поддержки со стороны контроллера. Тем не менее, резольверы обладают весьма высокой стойкостью к внешним воздействующим факторам: как механическим (удары, вибрации), так и климатическим и превосходят по этому параметру энкодеры.
Энкодер – потенциометр
Потенциометры, используемые как датчик положения, имеют мало конструктивных отличий от обычных потенциометров. Они являются относительно недорогими датчиками, которые могут обеспечить средний уровень точности и выпускаются в различных конструктивных исполнениях. По сравнению с энкодерами потенциометры имеют ограниченный срок службы из-за механического износа, чувствительны к вибрации и ударам и имеют ограниченный диапазон рабочих температур.
avi-solutions.com
Что такое энкодер? – СТЛ-ГРУПП

Контроллер (датчик) положения вращающегося объекта или по-другому энкодер – это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала).
В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер – это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается. Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал. Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров. Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала. Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
По принципу действия энкодеры различают:
- оптические
- магнитные
- магниторезисторные
Оптические
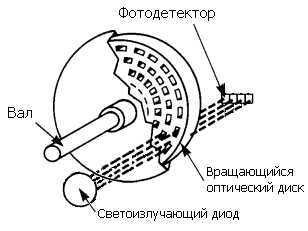
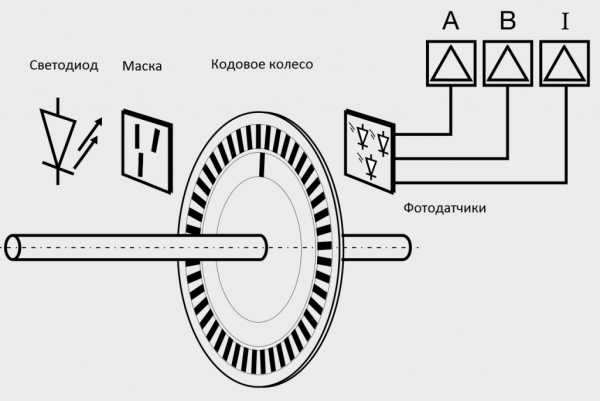
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
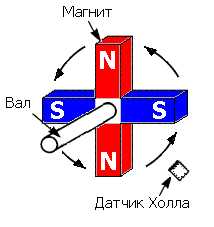
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
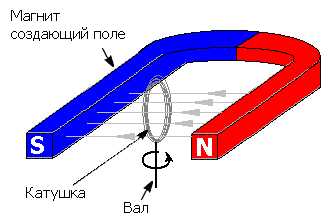
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
 Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
 Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.www.stl-grupp.com
Энкодер – Help for engineer
Энкодер
Энкодер – это так называемый датчик угла поворота, то есть, устройство, которое предназначено чтобы преобразовать угол поворота вала (измеряемого объекта) в электрические импульсы, по которым можно определить: угол поворота, скорость вращения, направление вращения, и текущее положение относительно начальной точки работы.
Датчики угла поворота (далее энкодеры) нашли широкое применение в различных механизмах, в которых необходимо точно знать текущее положение. Такими механизмами могут быть: промышленные манипуляторы, сервоприводы и т.д.

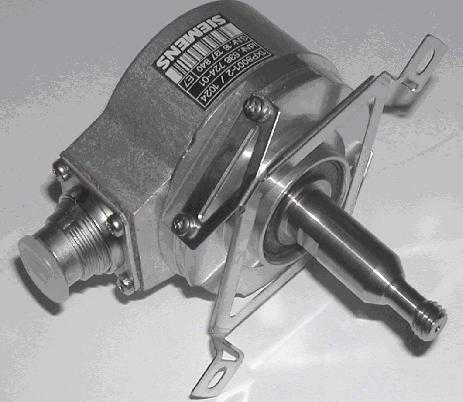
Рисунок 1 – Внешний вид энкодера
Энкодеры имеют разделение на :
– инкрементальные;
– абсолютные.
По характеру исполнения подразделяются на :
– Резисторные;
– Магнитные;
– Оптические.
Инкрементальный энкодер
По своей сути инкрементальный энкодер – это счетчик импульсов, которые возникают при вращении вала. Устанавливают энкодер непосредственно на вал, или соединяют их через гибкую переходную муфту.
Внутри энкодера расположен диск с рисками, где с одной стороны располагается источник света, а с другой – фотоприёмник. При вращении диска изменяется количество света, проходящего через риски диска на фотоприемник, далее сигнал преобразуется и передается на дискретный выход. Необходимо заметить, что выходной сигнал состоит из двух каналов, в которых импульсы имеют сдвиг на 90 градусов относительно друг друга, что позволяет нам определять направление вращения вала. Количество импульсов может быть от нескольких импульсов до десятков тысяч импульсов на один оборот – так называемое «разрешение энкодера». Например, если диск будет иметь 2000 рисок на оборот, то за 1000 импульсов вал повернулся на 180 градусов.
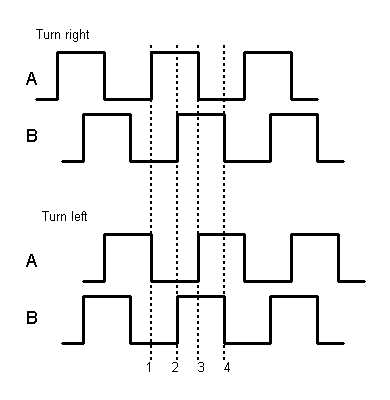
Рисунок 2 – Диаграмма импульсов энкодера смещенных на 90 градусов.
Чтобы привязать отсчет положения относительно начала координат, датчики так же имеют референтную метку (указатель нулевой отметки/импульс, который отвечает за полный оборот). То есть, при каждом обороте вала, на выходе будет еще один импульс начальной (нулевой) позиции. Этот выход обычно используется для сброса внешнего счетчика, который отвечает за текущее положение.
Абсолютный энкодер
Абсолютный энкодер по своему исполнению является оптическим.
В первую очередь они разделяются на однооборотный, в котором текущая координата определяется в рамках одного оборота, и многооборотные.
Абсолютный энкодер можно отнести к отдельному типу энкодеров, отличительной особенностью которых является уникальный код , сформированный для каждой позиции вала. Так же разница от инкрементального энкодера: в данном датчике не нужен счетчик импульсов, потому что мы всегда знаем угол поворота. Выходной сигнал абсолютного энкодера формируется как во время покоя, так и во время вращения вала. Внутренней отличительной особенностью является диск с несколькими концентрическими дорожками, каждой из которых получается уникальный двоичный код для определенной позиции вала. Абсолютный энкодер при потере питания не теряет своего значения, что говорит о том, что нам не нужно возвращение в начальную позицию. Сигнал абсолютного энкодера устойчив к помехам, что говорит о том, что для него не требуется точная установка вала. Данный тип датчиков хорошо устойчив к вибрациям.
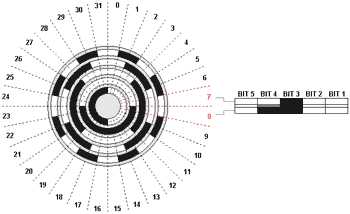
Рисунок 3 – Диск абсолютного энкодера с несколькими дорожками
Наиболее распространёнными выходными сигналами являются: параллельный код, код Грея, интерфейсы Profibus-DP, LWL, DeviceNet, SSI, CANopen, через которые также можно осуществить программирование датчиков.
Магнитный энкодер
Магнитный энкодер улавливает полюса вращающегося магнитного элемента, который находится вблизи чувствительного элемента, преобразуя эти влияния в соответствующий цифровой код.
Добавить комментарий
h4e.ru
